14.2.1. Регулирование PT1-участка с помощью P-стабилизатора
14.2.1. Регулирование PT1-участка с помощью P-стабилизатора
На рис. 14.7 показана закрытая регулируемая цепь, в которой PT1-участок регулируется с помощью пропорционального регулятора (P-регулятора).
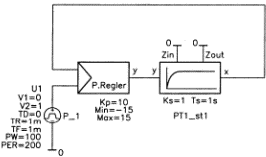
Рис. 14.7. Регулируемая цепь с РТ1-участком и P-регулятором
К входу w регулятора подсоединен источник напряжения VPULSE, подающий входные команды. P-регулятор сравнивает x — выходную величину регулируемого участка — с входной величиной w. Разница входной и регулируемой величин умножается на коэффициент усиления регулятора Kp. Этот сигнал, передаваемый через регулирующий орган, оказывает управляющее воздействие у на регулируемый участок. Конечно, управляющее воздействие регулирования не безгранично, так как ни один вентиль нельзя открыть дальше, чем это возможно, и ни один операционный усилитель не может подать большее напряжение, чем позволяет напряжение питания. Поэтому для модели P-регулятора предусмотрены ограничения, которые устанавливаются атрибутами Min и Мах.
Показанная переходная характеристика обнаруживает типичное свойство регулирования с помощью P-регуляторов: несмотря на то что входная величина изменяется скачком до 1 В, регулируемая величина достигает всего лишь 0.9 В. При уменьшении коэффициента усиления Kp это «остаточное рассогласование» становится еще больше.
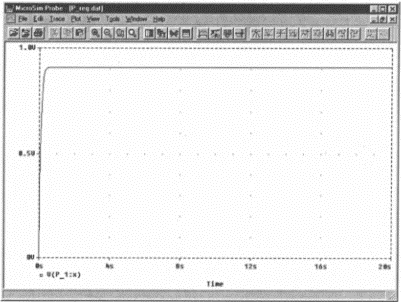
Рис. 14.8. Переходная характеристика регулируемой цепи
Если ко входу регулируемого участка zin прикладывается импульс помехи напряжением 0.5 В (рис. 14.9), то регулируемая величина имеет переходную характеристику, как на рис. 14.10.
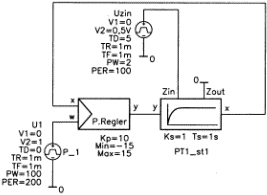
Рис. 14.9. Регулируемая цепь с помехой на входе регулируемого участка
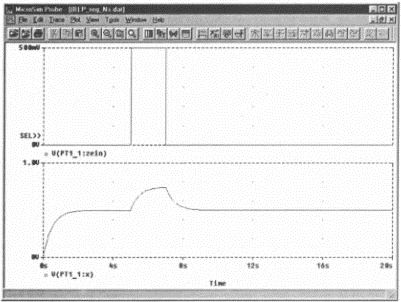
Рис. 14.10. Переходная характеристика регулируемой цепи с учетом действия импульсной помехи
На рис. 14.10 видно, что P-регулятор также не может полностью устранить помехи.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Управление сертификатами с помощью ММС
Управление сертификатами с помощью ММС Для того чтобы посмотреть свойства созданных сертификатов, нам потребуется запустить консоль управления Microsoft Management Console (ММС) — инструмент для создания, сохранения и открытия средств администрирования (называемых консолями (Snap-in)
Выделение участка звуковой волны
Выделение участка звуковой волны Перед редактированием звука необходимо выделить участок звуковой волны, предназначенной для коррекции, иначе программа обработает весь файл целиком, что также часто применяется на практике.Для выделения небольшого фрагмента выполните
14.2.2. Регулирование PT3-участка с помощью P-регулятора
14.2.2. Регулирование PT3-участка с помощью P-регулятора На рис. 14.11 изображена регулируемая цепь с PT3-участком и P-регулятором. Соответствующая переходная характеристика показана на рис. 14.12. Рис. 14.11. Регулируемая цепь с PT3-участком и P-регулятором Рис. 14.12. Переходная
Визуализация плана участка
Визуализация плана участка Для получения визуального изображения созданного плана проекта в программе Landscaping and Deck Designer предусмотрены специальные инструменты. Рассмотрим подробно, что это за инструменты и как ими воспользоваться. Для этого выполните следующие
Просмотр ночного освещения участка
Просмотр ночного освещения участка Для представления участка с ночным освещением в программе Landscaping and Deck Designer предусмотрена специальная функция, позволяющая обозревать вид участка ночью. Рассмотрим подробнее, как это сделать.Нажмите кнопку Toggle Sunlight (Переключатель
Проект участка с деревьями и кустарниками в программе 3D Home Architect Design Suite Deluxe
Проект участка с деревьями и кустарниками в программе 3D Home Architect Design Suite Deluxe Рассмотрим пример создания проекта с деревьями и кустарниками в программе 3D Home Architect Design Suite Deluxe. Добавим растительность – деревья и кустарники в проект, созданный в программе.Откройте программу 3D
Создание рельефа и обозначение границ участка
Создание рельефа и обозначение границ участка С помощью программы внесем в проект неровности местности и обозначим рельеф участка. Однако сначала для привязки объектов рельефа к местности определим и обозначим на плане границы участка.Создадим рельеф поверхности
Озеленение участка
Озеленение участка Внеся в план проекта основные объекты, пора подумать об озеленении участка, о придании ему привлекательности и индивидуальности. Вариантов облагородить свой участок с помощью растений очень много. Тут можно дать полет своей фантазии, применить
Сравнение с помощью Like
Сравнение с помощью Like Как правило, с помощью Like строка сравнивается не с конкретным набором символов, а с заданным образцом, в котором используются замещающие символы, когда нужно убедиться, что строка попадает (или не попадает) в некоторый класс строк. У меня нет
Визуализация с помощью V-Ray
Визуализация с помощью V-Ray Если вы желаете добиться фотографической реалистичности, для визуализации сцены лучше использовать специальные подключаемые фотореалистичные визуализаторы, точность просчета которых на порядок выше, чем у стандартного модуля визуализации
Программирование с помощью атрибутов
Программирование с помощью атрибутов Как сказано в начале этой главы, одной из задач компилятора .NET является генерирование метаданных для всех определяемых типов и для типов, на которые имеются ссылки. Кроме этих стандартных метаданных, содержащихся в каждом
Выделение участка текста
Выделение участка текста Вы, должно быть, уже знаете – чтобы проделать с кусочком текста какую-либо операцию (в данном случае – форматирование), этот самый кусочек необходимо выделить. Как осуществляется выделение, вы тоже помните: с помощью левой кнопки мышки (либо
Редактирование с помощью ручек
Редактирование с помощью ручек Выбранными объектами можно манипулировать с помощью ручек – маленьких квадратиков, которые высвечиваются в определяющих точках выбранных объектов (рис. 11.1). Рис. 11.1. Примеры примитивов с ручкамиПри включенном режиме работы с ручками
Написание игр с помощью J2ME
Написание игр с помощью J2ME Платформа Java для мобильных устройств (часто именуемая J2ME от Java 2 Micro Edition) является основной платформой для разработки приложений под мобильные телефоны. Разработчики языка позаботились о том, чтобы приложение функционировало одинаково на всех