13.4. Поиск с предпочтением в И/ИЛИ-графах
13.4. Поиск с предпочтением в И/ИЛИ-графах
13.4.1. Эвристические оценки и алгоритм поиска
Базовые процедуры поиска предыдущего раздела производят систематический и полный просмотр И/ИЛИ-дерева, не руководствуясь при этом какими-либо эвристиками. Для сложных задач подобные процедуры весьма не эффективны из-за большой комбинаторной сложности пространства поиска. В связи с этим возникает необходимость в эвристическом управлении поиском, направленном на уменьшение комбинаторной сложности за счет исключения бесполезных альтернатив. Управление эвристиками, излагаемое в настоящем разделе, будет основано на численных эвристических оценках "трудности" задач, входящих в состав И/ИЛИ-графа. Программу, которую мы составим, можно рассматривать как обобщение программы поиска с предпочтением в пространстве состояний гл. 12.
Начнем с того, что сформулируем критерий оптимальности, основанный на стоимостях дуг И/ИЛИ-графа. Во-первых, мы расширим наше представление И/ИЛИ-графов, дополнив его стоимостями дуг. Например, И/ИЛИ-граф рис. 13.4 можно представить следующими предложениями:
а ---> или : [b/1, с/3].
b ---> и : [d/1, e/1].
с ---> и : [f/2, g/1].
e ---> или : [h/6].
f ---> или : [h/2, i/3].
цель( d). цель( g). цель( h).
Стоимость решающего дерева мы определим как сумму стоимостей его дуг. Цель оптимизации - найти решающее дерево минимальной стоимости. Как и раньше, иллюстрацией служит рис. 13.4.
Будет полезным определить стоимость вершины И/ИЛИ-графа как стоимость оптимального решающего дерева для этой вершины. Стоимость вершины, определенная таким образом, соответствует "трудности" соответствующей задачи.
Мы будем предполагать, что стоимости вершин И/ИЛИ-графа можно оценить (не зная соответствующих решающих деревьев) при помощи эвристической функции h. Эти оценки будут использоваться для управления поиском. Наша программа поиска начнет свою работу со стартовой вершины и, распространяя поиск из уже просмотренных вершин на их преемников, будет постепенно наращивать дерево поиска. Этот процесс будет строить дерево даже в том случае, когда сам И/ИЛИ-граф не является деревом; при этом граф будет разворачиваться в дерево за счет дублирования своих отдельных частей.
Для продолжения поиска будет всегда выбираться "наиболее перспективное" решающее дерево-кандидат. Каким же образом используется функция h для оценки степени перспективности решающего дерева-кандидата или, точнее, вершины-кандидата — корня этого дерева?
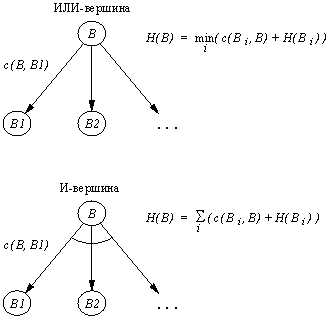
Рис. 13.9. Получение оценки H трудности задач И/ИЛИ-графа.
Обозначим через H(В) оценку трудности вершины В. Для самой верхней вершины текущего дерева поиска H(В) просто совпадает с h(В). С другой стороны, для оценки внутренней вершины дерева поиска нам не обязательно использовать непосредственно значение h, поскольку у нас есть некоторая дополнительная информация об этой вершине: мы знаем ее преемников. Следовательно, как показано на рис. 13.9, мы можем приближенно оценить трудность внутренней ИЛИ-вершины как
где с(В, Вi) — стоимость дуги, ведущей из В в Вi. Взятие минимума в этой формуле оправдано тем обстоятельством, что для того, чтобы решить задачу В, нам нужно решить только одну из ее задач-преемников. Трудность И-вершины В можно приближенно оценить так:

Будем называть H-оценку внутренней вершины "возвращенной" (backed-up) оценкой.
Более практичной с точки зрения использования в нашей программе поиска является другая величина F, которую можно определить в терминах H следующим образом. Пусть В1 — вершина-предшественник вершины В в дереве поиска, причем стоимость дуги, ведущей из В1 в В, равна с(В1, В), тогда положим
F( B) = с( В1, В) + H( В)
Пусть В1 — родительская вершина вершины В, а В1, В2, … — ее дочерние вершины, тогда, в соответствии с определениями F и H, имеем
 , если В — ИЛИ-вершина
, если В — ИЛИ-вершина
 , если В — И-вершина
, если В — И-вершина
Хотя стартовая вершина А и не имеет предшественника, будем считать, что стоимость ведущей в нее (виртуальной) дуги равна 0. Если положить h равным 0 для всех вершин И/ИЛИ-дерева, то для любого найденного оптимального решающего дерева окажется, что его стоимость, т.е. сумма стоимостей его дуг, в точности равна F(A).
На любой стадии поиска каждый преемник ИЛИ-вершины соответствует некоторому альтернативному решающему дереву-кандидату. Процесс поиска всегда принимает решение продолжать просмотр того дерева-кандидата, для которого F-оценка минимальна. Вернемся еще раз к рис. 13.4 и посмотрим, как будет вести себя процесс, поиска на примере И/ИЛИ-графа, изображенного на этом рисунке. В начале дерево поиска состоит всего из одной вершины — стартовой вершины а, далее дерево постепенно "растет" до тех пор, пока не будет найдено решающее дерево. На рис. 13.10, показан ряд "мгновенных снимков", сделанных в процессе роста дерева поиска. Для простоты мы предположим, что h = 0 для всех вершин. Числа, приписанные вершинам на рис. 13.10 — это их F-оценки (разумеется, по мере накопления информации в процессе поиска они изменяются). Ниже даются некоторые пояснительные замечания к рис. 13.10.
После распространения поиска из первоначального дерева (снимок А) получается дерево В. Вершина а — это ИЛИ-вершина, поэтому мы имеем два решающих дерева-кандидата: b и с. Поскольку F( b) = 1 < 3 = F( c), для продолжения поиска выбирается альтернатива b. Насколько далеко может зайти процесс роста поддерева b? Этот процесс может продолжаться до тех пор, пока не произойдет одно из двух событий:
(1) F-оценка вершины b станет больше, чем F-оценка ее конкурента с, или
(2) обнаружится, что найдено решающее дерево.
В связи с этим, начиная просмотр поддерева-кандидата b, мы устанавливаем верхнюю границу для F( b): F( b) ? 3 = F( c). Сначала порождаются преемники d и e вершины b (снимок С),после чего F-оценка b возрастает до 3. Так как это значение не превосходит верхнюю границу, рост дерева-кандидата с корнем в b продолжается. Вершина d оказывается целевой вершиной, а после распространения поиска из вершины e на один шаг получаем дерево, показанное на снимке D. В этот момент выясняется, что F( b) = 9 > 3, и рост дерева b прекращается. В результате процесс поиска не успевает "осознать", что h — это тоже целевая вершина и что порождено решающее дерево. Вместо этого происходит переключение активности на конкурирующую альтернативу с. Поскольку в этот момент F( b) = 9, устанавливается верхняя граница для F( c), равная 9. Дерево-кандидат с корнем с наращивается (с учетом установленного ограничения) до тех пор, пока не возникает ситуация, показанная на снимке E. Теперь процесс поиска обнаруживает, что найдено решающее дерево (включающее в себя целевые вершины h и g), на чем поиск заканчивается. Заметьте, что в качестве результата процесс поиска выдает наиболее дешевое из двух возможных решающих деревьев, а именно решающее дерево рис. 13.4(с).

Рис. 13.10. Трассировка процесса поиска с предпочтением в И/ИЛИ-графе (h = 0) при решении задачи рис. 13.4.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Поиск
Поиск В процессе работы в компьютере накапливается большое количество файлов, и зачастую сориентироваться в них самостоятельно и найти нужный оказывается затруднительно. В этом случае вам на помощь придет система поиска. В Windows Vista она была значительно
Поиск на научных сайтах с использованием платформы Flexum «Поиск по научным сайтам»
Поиск на научных сайтах с использованием платформы Flexum «Поиск по научным сайтам» Тема научного поиска не прошла мимо разработчиков персональных поисковиков. Подробному рассказу о возможностях таких поисковых систем посвящена отдельная глава нашей книги (см. главу 6).
RSS-поиск
RSS-поиск Пополнять список своего RSS-агрегатора можно различными способами. Первый и наиболее распространенный – простой поиск сайтов по интересующим темам, а затем подписка на их RSS-ленты, если, конечно таковые имеются. Способ несложный, однако на редкость медленный и
Поиск
Поиск Если вы хотите удалить пункт Поиск (Найти) из меню кнопки Пуск, то откройте разделHKEY_CURRENT_USER SoftwareMicrosoftWindowsCurrentVersionPoliciesExplоrer и создайте параметр NoFind типа DWORD со значением, равным 1.После перезагрузки пункт Поиск исчезнет из меню кнопки Пуск, а также исчезнет команда
Поиск
Поиск Классический видЧтобы использовать классический вид поиска файлов без анимированного персонажа, то присвойте строковому параметру Use Search Asst значение no в разделе HKCUSoftwareMicrosoftWindowsCurrentVersionExplorerCabinetStateОчистка истории раннее вводимых словЕсли вы часто пользуетесь
Поиск
Поиск На всех страницах сайта обязательно должно быть поле для поиска товаров. Удивительно, но в некоторых интернет-магазинах отсутствует поддержка поиска по сайту. Убедитесь, что на вашем сайте есть поиск. Более того, сделайте функцию поиска максимально заметной. Чаще
Поиск
Поиск Чтобы начать поиск, следует выполнить команду меню Search ? Find/Replace (Поиск ? Найти/Заменить) или нажать сочетание клавиш Ctrl+F. В нижней части окна программы появится панель поиска.В поле Find (Найти) необходимо указать искомое слово (или выражение), а затем нажать кнопку Find All
Яндекс. Поиск – быстрый поиск документов
Яндекс. Поиск – быстрый поиск документов Документы, как известно, имеют премерзкое свойство накапливаться. И чем больше документов, тем труднее в их залежах найти нужный. Электронные документы здесь не слишком отличаются от бумажных. Проблема места для хранения, правда,
Поиск
Поиск Управление отображением команды Поиск, которая также по умолчанию входит в состав меню кнопки Пуск, осуществляется в системном реестре в разделе HKEY_CURRENT_USERSoftwareMicrosoftWindowsCurrentVersionPoliciesExplorer с помощью REG_DWORD-параметра NoFind. Чтобы удалить данную функцию, следует присвоить
11.4. Замечания относительно поиска в графах, оптимальности к сложности
11.4. Замечания относительно поиска в графах, оптимальности к сложности Сейчас уместно сделать ряд замечаний относительно программ поиска, разработанных к настоящему моменту: во-первых, о поиске в графах, во-вторых, об оптимальности полученных решений и, в-третьих, о
Глава 12 Поиск с предпочтением: эвристический поиск
Глава 12 Поиск с предпочтением: эвристический поиск Поиск в графах при решении задач, как правило, невозможен без решения проблемы комбинаторной сложности, возникающей из-за быстрого роста числа альтернатив. Эффективным средством борьбы с этим служит эвристический
12.2. Поиск c предпочтением применительно к головоломке "игра в восемь"
0
12.3. Применение поиска с предпочтением к планированию выполнения задач
12.3. Применение поиска с предпочтением к планированию выполнения задач Рассмотрим следующую задачу планирования. Дана совокупность задач t1, t2, …, имеющих времена выполнения соответственно T1, Т2, …. Все эти задачи нужно решить на m идентичных процессорах. Каждая задача
Поиск
Поиск Проблема поиска информации существовала всегда. Поиск информации на локальном компьютере напоминает работу поисковых систем Интернета. В данном случае можно также выделить два основных направления поиска: обычный и усложненный. Под обычным подразумевается поиск