10.1.2.3 Read и Writе
10.1.2.3 Read и Writе
Алгоритмы чтения и записи ядром на устройстве похожи на аналогичные алгоритмы для файлов обычного типа. Если процесс производит чтение или запись на устройстве посимвольного ввода-вывода, ядро запускает процедуры read или write, определяемые типом драйвера. Несмотря на часто встречающиеся ситуации, когда ядро осуществляет передачу данных непосредственно между адресным пространством задачи и устройством, драйверы устройств могут буферизовать информацию внутри себя. Например, терминальные драйверы для буферизации данных используют символьные списки (раздел 10.3.1). В таких случаях драйвер устройства выделяет "буфер", копирует данные из пространства задачи при выполнении процедуры write и выводит их из "буфера" на устройство. Процедура записи, управляемая драйвером, регулирует объем выводимой информации (т. н. управление потоком данных): если процессы генерируют информацию быстрее, чем устройство выводит ее, процедура записи приостанавливает выполнение процессов до тех пор, пока устройство не будет готово принять следующую порцию данных. При чтении драйвер устройства помещает данные, полученные от устройства, в буфер и копирует их из буфера в пользовательские адреса, указанные в вызове системной функции.
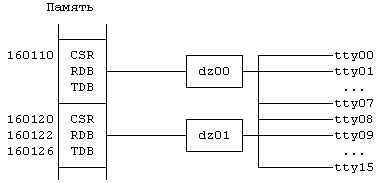
Рисунок 10.5. Отображение в памяти ввода-вывода с использованием контроллера VAX DZ11
Конкретный метод взаимодействия драйвера с устройством определяется особенностями аппаратуры. Некоторые из машин обеспечивают отображение ввода-вывода в памяти, подразумевающее, что конкретные адреса в адресном пространстве ядра являются не номерами ячеек в физической памяти, а специальными регистрами, контролирующими соответствующие устройства. Записывая в указанные регистры управляющие параметры в соответствии со спецификациями аппаратных средств, драйвер осуществляет управление устройством. Например, контроллер ввода-вывода для машины VAX-11 содержит специальные регистры для записи информации о состоянии устройства (регистры контроля и состояния) и для передачи данных (буферные регистры), которые формируются по специальным адресам в физической памяти. В частности, терминальный контроллер VAX DZ11 управляет 8 асинхронными линиями терминальной связи (см. [Levy 80], где более подробно объясняется архитектура машин VAX). Пусть регистр контроля и состояния (CSR) для конкретного терминала DZ11 имеет адрес 160120, передающий буферный регистр (TDB) — адрес 120126, а принимающий буферный регистр (RDB) — адрес 160122 (Рисунок 10.5). Для того, чтобы передать символ на терминал "/dev/tty09", драйвер терминала записывает единицу (1 = 9 по модулю 8) в указанный двоичный разряд регистра контроля и состояния и затем записывает символ в передающий буферный регистр. Запись в передающий буферный регистр является передачей данных. Контроллер DZ11 выставляет бит "выполнено" в регистре контроля и состояния, когда готов принять следующую порцию данных. Дополнительно драйвер может выставить бит "возможно прерывание передачи" в регистре контроля и состояния, что заставляет контроллер DZ11 прерывать работу системы, когда он готов принять следующую порцию данных. Чтение данных из DZ11 производится аналогично.
На других машинах имеется программируемый ввод-вывод, подразумевающий, что в машине имеются инструкции по управлению устройствами. Драйверы управляют устройствами, выполняя соответствующие инструкции. Например, в машине IBM 370 имеется инструкция "Start I/O" (Начать ввод-вывод), которая инициирует операцию ввода-вывода, связанную с устройством. Способ связи драйвера с периферийными устройствами незаметен для пользователя.
Поскольку интерфейс между драйверами устройств и соответствующими аппаратными средствами является машинно-зависимым, на этом уровне не существует стандартных интерфейсов. Как в случае вводавывода с отображением в памяти, так и в случае программируемого ввода-вывода драйвер может посылать на устройство управляющие последовательности с целью установления режима прямого доступа в память (ПДП) для устройства. Система позволяет осуществлять массовую передачу данных между устройством и памятью в режиме ПДП параллельно с работой центрального процессора, при этом устройство прерывает работу системы по завершении передачи данных. Драйвер организует управление виртуальной памятью таким образом, чтобы ячейки памяти с их действительными номерами использовались для ПДП.
Быстродействующие устройства могут иногда передавать данные непосредственно в адресное пространство задачи, без вмешательства буфера ядра. В результате повышается скорость передачи данных, поскольку при этом производится на одну операцию копирования меньше, и, кроме того, объем данных, передаваемых за одну операцию, не ограничивается размером буферов ядра. Драйверы, осуществляющие такую передачу данных без "обработки", обычно используют блочный интерфейс для процедур посимвольного чтения и записи, если у них имеется двойник блочного типа.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
13.4. Альтернативы read() и write()
13.4. Альтернативы read() и write() Несмотря на то что системные вызовы read() и write() как нельзя лучше подходят приложениям для извлечения и хранения данных в файле, все же они не всегда являются самыми быстрыми методами. Они допускают управление отдельными порциями данных; для
16.5.9. Управление read()
16.5.9. Управление read() Два элемента в массиве с_сс не являются управляющими символами и имеют отношение только к неформатируемому режиму: VTIME и VMIN. В этом режиме они определяют, когда возвращается read(). В каноническом режиме read() возвращается только в том случае, если строки
Функция read(2) и readv(2)
Функция read(2) и readv(2) Функции read(2) и readv(2) позволяют считывать данные из файла, на который указывает файловый дескриптор, полученный с помощью функций open(2), creat(2), dup(2), dup2(2), pipe(2) или fcntl(2). Функции имеют следующий вид:#include <unistd.h>ssize_t read(int fildes, void *buf, size_t nbyte);#include <sys/types.h>#include
Книги must read
Книги must read Мы уже писали, почему книги не работают в случае обучения программированию. Тем не менее, есть литература, которая обязательно должна быть прочитана любым уважающим себя программистом. Это книги, в которых концентрация полезных знаний зашкаливает. Поэтому,
Пример 9-4. Ограничение времени ожидания команды read
Пример 9-4. Ограничение времени ожидания команды read #!/bin/bash# t-out.sh TIMELIMIT=4 # 4 секундыread -t $TIMELIMIT variable <&1echoif [ -z "$variable" ]then echo "Время ожидания истекло."else echo "variable = $variable"fi exit 0$UIDuser id numberUID (идентификатор) текущего пользователя, в соответствии с /etc/passwdЭто реальный UID текущего
Пример 11-4. Ввод многострочного текста с помощью read
Пример 11-4. Ввод многострочного текста с помощью read #!/bin/bashechoecho "Введите строку, завершающуюся символом , и нажмите ENTER."echo "Затем введите вторую строку, и снова нажмите ENTER."read var1 # При чтении, символ "" экранирует перевод строки. # первая строка # вторая
Пример 11-6. Чтение командой read из файла через перенаправление
Пример 11-6. Чтение командой read из файла через перенаправление #!/bin/bashread var1 <data-fileecho "var1 = $var1"# Первая строка из "data-file" целиком записывается в переменную var1read var2 var3 <data-fileecho "var2 = $var2 var3 = $var3"# Обратите внимание!# Поведение команды "read" далеко от ожидаемого!# 1) Произошел возврат
5.2. Команда read
5.2. Команда read Команда read читает одну строку из стандартного входного потока и записывает ее содержимое в указанные переменные. Если задана единственная переменная, в нее записывается вся строка. В результате ввода команды read без параметров строка помешается в