Свой робот ближе к телу: экзоскелет с поддержкой мелкой моторики и точная роборука Андрей Васильков
Свой робот ближе к телу: экзоскелет с поддержкой мелкой моторики и точная роборука
Андрей Васильков
Опубликовано 10 октября 2013
Сегодняшние роботы не только обретают новые качества: они всё теснее взаимодействуют с человеком, расширяя его возможности. Появилось даже целое новое направление в носимой робототехнике — экзоскелеты.
При разработке экзоскелетов приходится искать компромисс между целым рядом параметров. Среди них сила и точность движений, скорость выполнения манипуляций и степень их разнообразия, надёжность и сложность конструкции, время автономной работы и масса. Последние два особенно актуальны для всех носимых роботизированных компонентов.
На втором ежегодном коллоквиуме по робототехнике в Гарвардском университете доцент кафедры механической и биомедицинской инженерии Конор Уолш (Conor Walsh) представил экзоскелет с роботизированными перчатками для спасателей и военных. Он не только защищает суставы от избыточной нагрузки и усиливает движения крупных мышц, но также помогает при совершении мелких манипуляций.

Профессор Конор Уолш (слева) и доктор Панайотис Полигеринос обсуждают роботизированную перчатку (фото: Kirstin Hagelskj?r Petersen).
Многочисленные моторы усиливают движения пальцев, позволяя орудовать рукой в перчатке как универсальным и необычайно удобным инструментом. Человек, чьи возможности расширены при помощи такого экзоскелета, получает дополнительную силу без ущерба для ловкости, как это обычно происходит с другими подобными изобретениями.
Солдаты смогут увеличить массу носимого снаряжения и переносить тяжёлые грузы на большие расстояния, оставаясь всё время готовыми к бою. Во многих ситуациях спасатели получат возможность действовать в экстремальных условиях, не дожидаясь подхода тяжёлой техники, и в одиночку эвакуировать раненых.

Прототип мягкого экзоскелета (фото: Harvard Biodesign Lab.).
Исследование финансировалось DARPA, однако экзоскелет найдёт применение и в реабилитационной медицине, помогая пациентам быстрее восстанавливаться после инсульта и различных травм. Для этих целей команда Уолша разработала вариант мягкого эластомерного экзоскелета. Он аккуратно выполняет упражнения на восстановление подвижности пациентов с любыми поражениями нервной и опорно-двигательной систем, кроме паралича.
Это ограничение обусловлено необходимостью совершения хотя бы минимальных усилий самим пациентом. Экзоскелет берёт на себя роль тренера, который помогает правильно дозировать нагрузку и постепенно увеличивать амплитуду движений, но не станет выполнять упражнения вместо человека.
Аналогично баланс между массой параметров необходимо соблюдать и при создании манипуляторов для автономных роботов, потребность в которых растёт с каждым днём. Хотя манипуляторы для всех видов работ создавались десятилетиями, в этом направлении каждый год появляется что-то принципиально новое.
На том же коллоквиуме другой гарвардский профессор, Роберт Хау, представил i-HY — роботизированный манипулятор с открытой архитектурой, обеспечивающий высокую точность движений.

Прототип манипулятора i-HY (Harvard-Yale). Фото: biorobotics.harvard.edu.
В своём выступлении профессор Хау так прокомментировал важность разработки:
Представьте, что ураган разрушил энергоблок. Ремонтнику со стандартным оснащением будет трудно устранить неполадки и опасно находиться в этой зоне. Обычные роботы окажутся бесполезными из-за своей неуклюжести. Робот с таким манипулятором — самый предпочтительный вариант.
На протяжении многих лет группы исследователей тщетно пытаются создать робота с манипуляторами, обладающими достаточной силой, но в то же время способными быстро и точно выполнять мелкие движения, так необходимые при ремонте и ликвидации последствий чрезвычайных ситуаций. Называя разработку «роботизированной рукой для реального мира», Хау комментирует историю её создания:
С начала восьмидесятых были опубликованы сотни диссертаций на эту тему. Пока никому так и не удалось сделать робота, выполняющего разные операции в реальных условиях, а не на стенде. Поэтому мы отринули все прошлые концепты и перестали пытаться скопировать руку человека.
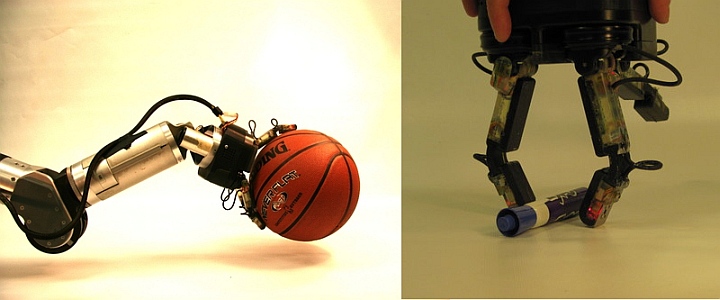
Манипулятор i-HY ловко захватывает крупные предметы и мелкие детали практически любой формы (фото: biorobotics.harvard.edu).
Универсальный манипулятор получился больше похожим на клешню омара. Это трёхпалая роботизированная рука, прототип которой создан методами 3D-печати. Она снабжена сенсорами, благодаря которым постоянно подстраивается под меняющиеся условия и дозирует усилия на каждый искусственный палец отдельно.
Совсем недавно основная масса роботов представляла собой тяжёлое автоматизированное оборудование для выполнения рутинных производственных процессов. Тяжёлые промышленные роботы производили сборку автомобилей и различной техники, с каждым поколением всё сильнее вытесняя людей с их прежних рабочих мест. Большинство людей вообще старалось не приближаться к ним без особой нужды из-за риска производственной травмы и психологической боязни, а операторы ограничивались дистанционным управлением.
Сейчас робототехника меняется на глазах. Один за другим создаются лёгкие, гибкие и даже носимые варианты, нацеленные на постоянное взаимодействие с человеком. Современные роботы не вытесняют людей, а лишь расширяют их возможности, позволяя работать более эффективно.
К оглавлению
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Десять лет Facebook: всё только начинается! Андрей Васильков
Десять лет Facebook: всё только начинается! Андрей Васильков Опубликовано 04 февраля 2014 Сегодня крупнейшая в мире социальная сеть Facebook отмечает свой десятилетний юбилей. Она прошла сложный путь от локального сетевого сервиса для студентов
Гиперзвуковой SR-72: скорость как залог неуязвимости Андрей Васильков
Гиперзвуковой SR-72: скорость как залог неуязвимости Андрей Васильков Опубликовано 05 ноября 2013 После долгого периода разработок в атмосфере повышенной секретности в компании Lockheed Martin официально представили программу создания нового
Десять смартфонов с поддержкой USB-OTG Андрей Васильков
Десять смартфонов с поддержкой USB-OTG Андрей Васильков Опубликовано 08 мая 2013 По итогам апреля аналитики отмечают, что на фоне общего подъёма рынка мобильных устройств доля ноутбуков и нетбуков продолжает падать. Во многом это происходит потому, что
Onyx выпускает смартфон с E Ink дисплеем Андрей Васильков
Onyx выпускает смартфон с E Ink дисплеем Андрей Васильков Опубликовано 16 мая 2013 Фирма Onyx, известная своими читалками серии Boox, решила воплотить идею смартфона с E Ink дисплеем. На официальном сайте компании недавно появилось описание новой модели E43,
Dance Fiction: танцовщицы под напряжением Андрей Васильков
Dance Fiction: танцовщицы под напряжением Андрей Васильков Опубликовано 25 декабря 2013 Уроженец Сингапура и выпускник Королевской академии искусств в Лондоне Чой Ка Фай использует электрическую стимуляцию мышц, чтобы превратить нетренированных людей в
Это приложение превратит смартфон в телохранителя Андрей Васильков
Это приложение превратит смартфон в телохранителя Андрей Васильков Опубликовано 26 февраля 2014 Многочисленным датчикам смартфона и даже простому микрофону находится всё больше неожиданных применений. Молодая американская компания One Llama
Microsoft превращает игроков в разработчиков Андрей Васильков
Microsoft превращает игроков в разработчиков Андрей Васильков Опубликовано 05 декабря 2013 Компания Microsoft возобновила приём заявок на участие в Project Spark. Этот проект позволит геймерам самим стать разработчиками игр для консолей Xbox One, Xbox 360 и ОС Windows 8.
Восемь секретов Windows 8 Андрей Васильков
Восемь секретов Windows 8 Андрей Васильков Опубликовано 04 апреля 2013Президент подразделения по производству чипов памяти Samsung Чун Тон Су недавно выступил с резкой критикой Windows 8. В своём заявлении он утверждает, что в целом отмечается слабый интерес к новой ОС, а её судьба
За детьми присмотрит робот Андрей Письменный
За детьми присмотрит робот Андрей Письменный ОпубликованоАндрей Письменный Московский Городской Педагогический Университет ассоциируется с конструированием роботов в последнюю очередь. Тем не менее, именно здесь создан проект, занявший второе
Тестовые приложения для смартфонов с ОС Android Андрей Васильков
Тестовые приложения для смартфонов с ОС Android Андрей Васильков Опубликовано 20 августа 2013 Среди множества бесплатных программ для смартфонов с ОС Android особое место занимают тестовые и диагностические утилиты. Помимо удобного способа проверки
Как выглядит пользователь для Microsoft Kinect 2.0 Андрей Васильков
Как выглядит пользователь для Microsoft Kinect 2.0 Андрей Васильков Опубликовано 04 октября 2013 Контроллер Kinect версии 2.0 появится в игровой приставке восьмого поколения Microsoft Xbox One, официальные продажи которой начнутся в конце ноября. Как выглядит мир
Миллиардные ставки Facebook на виртуальность Андрей Васильков
Миллиардные ставки Facebook на виртуальность Андрей Васильков Опубликовано 06 мая 2014 Ещё недавно коллектив молодой компании Oculus VR стоял на Kickstarter «с протянутой рукой», а сейчас создатели шлема виртуальной реальности (ВР) становятся законодателями
Выбираем фотоаппарат для летнего отдыха Андрей Васильков
Выбираем фотоаппарат для летнего отдыха Андрей Васильков Опубликовано 06 июля 2013 Съёмка во время летнего отпуска – своеобразный и довольно специфический жанр фотографии. Для него требуется техника, которая не обременяет отдыхающих, но вместе с
IBM представила первые серверы OpenPOWER Андрей Васильков
IBM представила первые серверы OpenPOWER Андрей Васильков Опубликовано 24 апреля 2014 На этой неделе IBM представила первые серверы OpenPOWER, созданные по инициативе одноимённого отраслевого альянса. Кроме самой IBM, в него вошли Google, Nvidia и другие компании,
OMsignal: «умная» рубашка ближе к телу Андрей Васильков
OMsignal: «умная» рубашка ближе к телу Андрей Васильков Опубликовано 13 мая 2014 Компания OMsignal объявила о старте предварительных продаж спортивной одежды с биометрическими функциями. «Умная» одежда позволяет точно отслеживать уровень нагрузки во
Три варианта скоростного Wi-Fi: надежды и опасения Андрей Васильков
Три варианта скоростного Wi-Fi: надежды и опасения Андрей Васильков Опубликовано 28 февраля 2013Реализация Wi-Fi 802.11n в современных телефонах и планшетах оставляет желать много лучшего. Новые стандарты 802.11ac и 802.11ad обещают в перспективе гигабитные скорости и обсуждаются не