Модульные роботы адаптируются к поломкам Михаил Карпов
Модульные роботы адаптируются к поломкам
Михаил Карпов
ОпубликованоМихаил Карпов
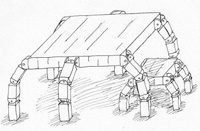
Группа европейских робототехников разработала программное обеспечение, которое позволяет модульным роботам адаптироваться к ситуациям, когда одна из их частей перестаёт работать. Дэвид Кристенсен из Университета Южной Дании в Оденсе и его коллеги из Щвейцарского государственного технологического института в Лозанне создали имитацию четвероногого робота, составленного из десятков «румботов».
Румботы
"Румботы" — это идентичные друг другу роботы сферической формы, которые могут собираться в единую конструкцию для того, чтобы выполнять сообща конкретную задачу. Интересно, что авторы исследования видят их в качестве самособирающейся, реконфигурирующейся и самочинящейся мебели — именно создание такой мебели является одной из основных целей проекта.
Авторы говорят, что модульные роботы, сделанные из простых унифицированных частей, намного надёжнее обычных. Коннекторы между модулями позволят создавать многообразие форм и изменять структуру устройства в зависимости от поставленных задач.
Помимо разработки алгоритмов, которые позволят «румботам» успешно функционировать, учёные намереваются сделать и эффективный интерфейс, чтобы пользователь мог без труда управлять роботами. Проект разрабатывается при финансовой поддержке Microsoft Research Cambridge и Федеральной политехнической школы Лозанны.
Эксперимент
В эксперименте каждый из маленьких роботов двигается случайным образом, а потом выясняет, насколько его движения сказались на скорости четырёхногого составного робота, движущегося из одной точки в другую. Через 10 минут он обнаруживает, как эффективно пользоваться ногами, и увеличивает свою скорость с 5 см/с до 31 см/с.
Когда один из «румботов» сломался и скорость сразу же снизилась до 15 см/с, четвероногий составной робот приспособился к этому новому условию. Через 20 минут он смог увеличить скорость до 21 см/с.
Здесь был вставлен Flash-объект. К сожалению, на данный момент его автоматическая обработка при конвертации в FB2 не поддерживается. Вы можете просмотреть оригинальную версию статьи здесь.
В принципе, это далеко не первый робот, который способен адаптироваться к неисправностям. В 2006 году Джош Бонгард из Университета Вермонта в Бурлингтоне работал над многоногим роботом, который был способен изменять своё поведение в зависимости от того, не сломана ли какая-то из его частей.
По словам Дэвида Кристинсена, одного из разработчиков модульного робота, их детище отличается от устройства Бонгарда тем, что у него нет никакого централизованного «мозга», в который заложена информация о его конструкции и параметрах окружающей среды. Модульный робот достигает тех же результатов координации движений, хотя тут задействованы автономные самообучающиеся модули.
К оглавлению
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Как выживает The Pirate Bay Михаил Карпов
Как выживает The Pirate Bay Михаил Карпов Опубликовано 18 мая 2010 года Сайт The Pirate Bay пережил очередное отключение – 17 мая 2010 года он ушёл в оффлайн, а 18 мая уже вернулся к жизни. По слухам, хостинг пиратскому сайту теперь будет предоставлять шведская
Samsung Forum 2010 Михаил Карпов
Samsung Forum 2010 Михаил Карпов (http://www.youtube.com/watch?v=J7sniXz7BZg&feature)На форуме Samsung в Москве корейский гигант продемонстрировал все новинки 2010 года — и нетбуки, и смартфоны, и роботы — чего там только не было…Особый упор компания сделала на зарождающуюся технологию домашнего
Февральский приз Михаил Карпов
Февральский приз Михаил Карпов Редакция «Компьютерры» рада сообщить о вручении приза за лучшую читательскую статью, опубликованную в феврале. Ею стала заметка Александра Клименкова "Судоку: магия чисел", посвящённая, как нетрудно догадаться, игре судоку.Александр
Злоключения марсоходов Михаил Карпов
Злоключения марсоходов Михаил Карпов Марсоход Opportunity празднует своего рода юбилей: длина пройденного им пути достигла 20 км. Он проехал по пескам Марса дальше, чем любое другое колёсное средство передвижения, добравшееся до этой планеты.На первый взгляд, его рекорд может
Михаил Карпов Будущее Интернета
Михаил Карпов Будущее Интернета Десять лет назад Интернета в России не было. Как же так, спросите вы, вроде бы даже World Wide Web уже в течение пяти лет существовал, да и провайдеров куча была. Но нет, не было у нас Интернета. Конечно, какой-нибудь обладатель модема раз в месяц
Новая экзопланета Михаил Карпов
Новая экзопланета Михаил Карпов Когда меня попросили написать о том, какое событие 2009 года я считаю ключевым, сомнений в ответе не было. Конечно, я мог бы вспомнить про чудесное выздоровление главы Apple Стива Джобса после удачной пересадки печени, но кто такой Джобс и что
Некролог Second Life Михаил Карпов
Некролог Second Life Михаил Карпов Опубликовано 11 июня 2010 года Компания Linden Labs, создатель виртуального онлайнового мира Second Life, объявила о реструктуризации: будет уволено 30% сотрудников. Делается это, согласно официальной позиции представителей фирмы,
Анонимусы: кто они? Михаил Карпов
Анонимусы: кто они? Михаил Карпов Опубликовано 10 декабря 2010 года Девятого декабря у американских платёжных систем был плохой день: сайты Macstercard, Visa и Paypal лежали и платежи через интернет проходили далеко не всегда. Сайт американского сенатора Джо
Утка по-пекински Михаил Карпов
Утка по-пекински Михаил Карпов Опубликовано 02 февраля 2011 года Пассажирский авиалайнер совершает посадку в аэропорту Шанхая Пудон. В спинки кресел самолёта встроены информационные терминалы — с помощью них можно смотреть фильмы, играть в игры,
Планшеты и ноутбуки — кто победит? Михаил Карпов
Планшеты и ноутбуки — кто победит? Михаил Карпов Опубликовано 12 июля 2010 года Аналитики инвестиционного банка Barclays Capital провели исследование, согласно которому зарождающийся рынок планшетов должен сильно повлиять на грядущие продажи нетбуков и
E3 2010: Nintendo DS со стереоэкраном Михаил Карпов
E3 2010: Nintendo DS со стереоэкраном Михаил Карпов Опубликовано 16 июня 2010 года Компания Nintendo провела на выставке компьютерных игр E3 презентацию своей новой портативной игровой приставки Nintendo 3DS. Событие это не стало неожиданностью — фирма объявила о
Кафедра Ваннаха: Роботы-убийцы или датские деньги? Ваннах Михаил
Кафедра Ваннаха: Роботы-убийцы или датские деньги? Ваннах Михаил Опубликовано 30 ноября 2010 года Как любит говаривать знакомая редактор официоза потенциальным рекламодателям и просто пойманным в коридорах власти бизнесменам — читайте
Кафедра Ваннаха: Китай и все его роботы Ваннах Михаил
Кафедра Ваннаха: Китай и все его роботы Ваннах Михаил Опубликовано 17 февраля 2011 года Несмотря на колоссальные успехи народного хозяйства КНР, многие видные американские экономисты скептически относятся к перспективам развития этой страны. Ну, вот
Роботы-убийцы: с прицелом на будущее Михаил Карпов
Роботы-убийцы: с прицелом на будущее Михаил Карпов Опубликовано 27 октября 2010 года 1993 год. Сотни японцев стали свидетелями душераздирающей сцены — роботизированный краб, висевший у входа в ресторан, внезапно сошёл с ума и схватил в свои клешни
Кафедра Ваннаха: Роботы для мирного атома Ваннах Михаил
Кафедра Ваннаха: Роботы для мирного атома Ваннах Михаил Опубликовано 23 марта 2011 года Хорошо было в античности. Хочешь предаться интеллектуальным утехам — собрал сотоварищей за скромно накрытым столом, как Сократ, и беседуй с ними. Расход энергии
Модульные роботы M-Blocks, которых не может быть Андрей Васильков
Модульные роботы M-Blocks, которых не может быть Андрей Васильков Опубликовано 07 октября 2013 Молодой инженер Джон Романишин (John Romanishin) создал роботов M-Blocks, которые совсем недавно считались невозможными. Они уникальны тем, что умеют выполнять