Как сделали первые снимки тёмной стороны Луны Евгений Лебеденко, Mobi.ru
Как сделали первые снимки тёмной стороны Луны
Евгений Лебеденко, Mobi.ru
Опубликовано 05 июля 2011 года
Что бы мы делали без Голливуда? Не посмотри я на днях третью часть боевика «Трансформеры», так бы никогда и не узнал, что на обратной стороне Луны была база десептиконов. И что ее фотоснимки получены советским космическим аппаратом «Луна-4», отправленным к нашему спутнику в апреле 1960 года. Как в «Трансформерах» сообщил один из русских космонавтов, которых готовили к пилотируемому полету на Луну, снимки, полученные автоматической межпланетной станцией «Луна-4» были намного детальнее тех, первых в истории человечества снимков, которые сделала станция «Луна-3». Именно они и позволили выявить наличие на соседке Земли следы пребывания супостата, что в дальнейшем привело к свертыванию советской и американской лунных программ, и остальной завязке сюжета мирового блокбастера.
Версия этой истории, рассказанная в фильме, конечно, занимательна. Только вот станция «Луна-4А» так и не добралась до Луны — из-за недолива горючего в бак третьей ступени ее ракеты-носителя, а «Луна-4B» вообще не взлетела из-за аварии на старте. А ведь именно эти аппараты должны были продолжить успешную фотосессию темной стороны Луны, выполненную седьмого октября 1959 года станцией «Луна-3». Именно в этот день (точнее, в три часа ночи) советский космический аппарат передал серию из 29 фотографий части лунной поверхности, которая с Земли никогда не видна. За этим достижением стоял труд сотен инженеров, разработавших ракету-носитель, разгонный блок межпланетной станции, уникальную фототелевизионную аппаратуру "Енисей" и (впервые!) реализовавших управление положением космического аппарата в межпланетном пространстве — с помощью автономной системы ориентации «Чайка».
Успешная реализация идеи, заложенной в «Чайке», положила начало эре управляемых космических полетов, а также возможности сближения и стыковки космических аппаратов.
Полет «Луны-3». Небесная механика против
Представьте, что вы фотограф, мчащийся на полной скорости в автомобиле по покрытому льдом шоссе. Вашей камере с мощным телеобъективом предстоит сделать снимок огонька на верхушке Останкинской телебашни, находящейся от вас в ста километрах. Всё бы ничего, только вот из-за отсутствия сцепления колес с дорогой машина мчится вперед, «вальсируя» — вращаясь вокруг своей оси. Представили? Именно с такой ситуацией столкнулись разработчики автоматической межпланетоной станции «Луна-3».
Сотни фантастических фильмов накрепко вбили нам в голову тот факт, что в космосе движение корабля происходит по вполне земным законам. То есть корабль движется носом вперед, подталкиваемый с кормы реактивными струями из двигателей. А когда надо повернуть, бравый капитан отклоняет джойстик вправо или влево, и корабль послушно меняет свой курс — словно автомобиль на дороге.
Увы, всё это неправда. В отличие от земных условий в космическом пространстве нет внешней среды, в которой осуществляется движение (аналога дороги, воздуха или воды). С одной стороны, это замечательно. Ракета-носитель разгоняет корабль до нужной скорости и придает ему нужное направление движения. Не встречая никакого внешнего сопротивления, корабль будет двигаться в заданном направлении бесконечно долго (не будем сейчас обсуждать воздействие на него гравитации окружающих небесных тел). Именно эта возможность позволяет при точном прицеливании направить космический аппарат в строго заданную точку пространства. На Земле такой фокус не пройдет: ветер, морские течения или выбоины на дороге неизбежно собьют движущийся объект с курса. Зато эти враги целенаправленного движения позволяют сделать его управляемым. Мы поворачиваем руль и благодаря сцеплению колес с дорогой машина поворачивает в нужном направлении. Ту же роль играют рули судна или самолета. Мы изменяем движение, словно отталкиваясь от внешней среды.
Но в космосе нет вообще ничего, и центр масс корабля и вращение его корпуса вокруг центра масс оказываются «развязанными». При этом центр масс движется по заданной траектории, а корпус корабля в отсутствие всяких влияющих факторов может беспорядочно вращаться. Так «вальсирует» на обледеневшей трассе движущийся автомобиль, колеса которого утратили сцепление с дорогой. Именно так, кувыркаясь, и движутся к цели межпланетные станции. Никакого гордого движения новосой частью вперед.
Кувыркание движущегося комического аппарата — обычно не большая помеха выполнению экспериментов на его борту. Но только не в случае «Луны-3». Перед этой межпланетной станцией была поставлена задача сфотографировать невидимую с Земли сторону нашей небесной соседки. Для этого объектив фотоаппарата нужно жестко зафиксировать в определенном направлении. Сама же станция должна продолжать свой полет по заданной ей с Земли траектории. То есть требуется как раз то самое красивое движение из фильмов.
Борис Викторович Раушенбах
Перед коллективом ученых и инженеров, возглавляемым Борисом Викторовичем Раушенбахом, была поставлена задача управления ориентацией станции: получением нужного положения корпуса корабля относительно внешних ориентиров, в данном случае Луны. Благодаря их усилиям к середине пятидесятых годов прошлого столетия была разработана теория управления ориентацией космических аппаратов, в которой в четкой форме математических выражений описаны принципы управления положением корпуса аппарата в космическом пространстве, коррекции траектории его движения и гравитационных маневров, предложены инженерные решения этих непростых задач.
К 1958 году лаборатория Раушенбаха создала действующий прототип автономной системы ориентации, названный «Чайка». 5 мая 1959 года на исследовательском полигоне Тюратам (будущий Байконур) были проведены автономные испытания новой системы ориентации.
Вот как их описывает один из участников: "После этого для полной проверки «Чайки» будущий спутник поднимается краном на гибкой подвеске, раскачивается и закручивается вручную относительно трёх осей. Микродвигатели, к всеобщей радости, «фыркают», подтверждая, что при последних перепайках на борту адреса команд не перепутаны".
В проектной документации межпланентная станция «Луна-3» именовалась «объект E2-A2»
Что до испытания в боевых условиях, то его «Чайка» проходила на межпланетной космической станции-фотографе «Луна-3».
Система ориентации «Чайка». Анатомия и физиология
Как Раушенбаху и его сотрудникам удалось четко зафиксировать объетивы фотокамер мчащейся во весь опор «Луны-3» за сотни тысяч километров от Земли?
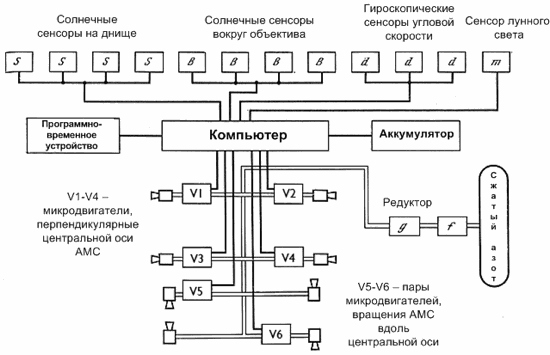
Компоненты автономной системы стабилизации «Чайка»
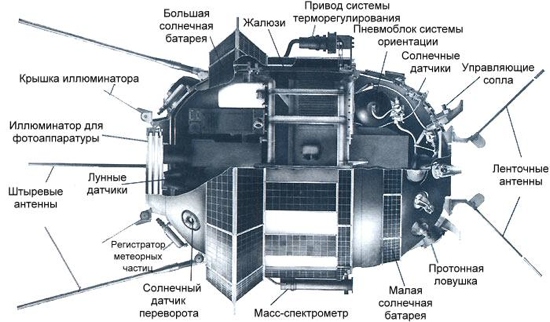
Вот так компоненты «Чайки» размещались на борту «Луны-3»
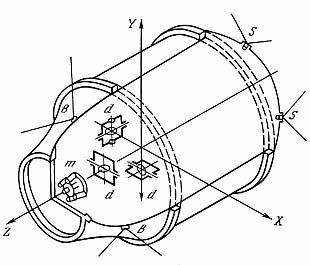
Автономная система ориентации «Чайка» имела в своем составе следующие, взаимодействующие между собой, компоненты: восемь сенсоров солнечного света — по четыре на днище станции (на рисунках обозначены "S") и вокруг объектива окна объективов фотокамер (на рисунках обозначены "В"), три гироскопических сенсора-стабилизатора (на рисунках обозначены "d"), непрерывно измеряющих угловую скорость «Луны-3» в трех плоскостях. Один серсор лунного света (на рисунках обозначен "m"), находившийся между объективами фотокамер, четыре реактивных микродвигателя (на рисунке обозначены «V1-V4»), крестообразно расположенные перпендикулярно центральной оси станции и две пары реактивных микродвигателей (на рисунке обозначены «V5» и «V6»), крестообразно расположенные по касательной к центральной оси станции.

Солнечные сенсоры «Чайки» вокруг фотоиллюминатора станции
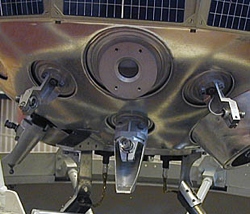
Солнечные сенсоры и микродвигатели «Чайки» на днище станции
Информацию от сенсоров получал и обрабатывал электромеханический компьютер, логика работы единственной программы которого базировалась на уравнениях управления ориентацией, разработанных коллективом Раушенбаха. Этот же компьютер управлял моментами запуска и продолжительностью работы восьми реактивных микродвигателей. В качестве топлива в них использовался сжатый азот, хранящийся в специальном баке под давлением 150 атмосфер и подающийся в сопла через редуктор под давлением четыре атмосферы. Компьютер был связан с программно-временным устройством, в котором была заложена циклограмма всего полета «Луны-3».
Миссия «Луна-3»
7 октября 1959 года — спустя трое суток после успешного старта, станция «Луна-3» оказалась в заданной точке траектории ее движения на расстоянии 65200 километров от обратной стороны Луны. Местоположение станции для съемки было выбрано не случайно. Во-первых, она размещалась так, что Луна перед ней и Солнце позади неё находились примерно на одной прямой, а вот Земля, свет которой мог помешать системе ориентации, оказывалась далеко в стороне. Во-вторых, по условиям съемки, «Луна-3» должна была захватить в объективы небольшой участок видимой с Земли поверхности нашего спутника, чтобы у ученых появилась возможность выполнить топографическую привязку местности к известны ориентирам.
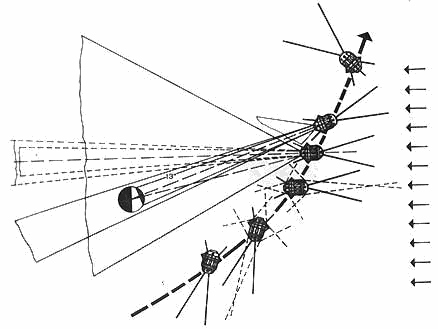
В процессе фотографирования система ориентации «Чайка» постоянно удерживала движущуюся станцию кормой к Солнцу
Корпус станции при подлете к точке съемки вращался вокруг ее центра масс с периодом 165 секунд. Эти измерения, выполненные гироскопическими сенсорами "d", позволили задействовать все восемь микродвигателей, практически остановив (погрешность 0,15 градуса в секунду) кувыркание станции по всем трем осям. Гироскопы при этом выполняли роль балансиров, демпфирующих в отсутствии трения действие двигателей ориентации. Этот маневр занял около десяти минут.
После остановки вращения в дело вступили солнечные сенсоры на днище «Луны-3» и вокруг ее объективов. Компьютер, начал подавать управление двигателям V1-V4 таким образом, чтобы максимизировать сигналы сенсоров "S" на днище, и одновременно минимизировать сигналы сенсоров "В" возле объективов. Этот маневр, длившийся около тридцати минут, развернул станцию объективом в сторону Луны, а днищем — к Солнцу.
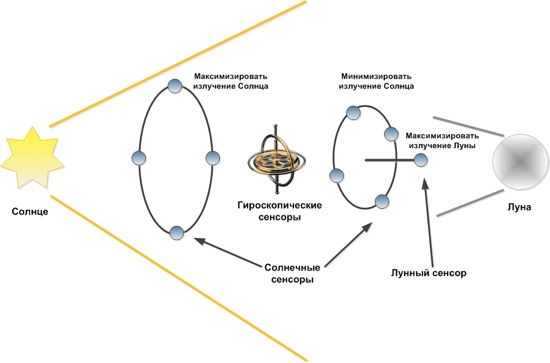
Точно направить объективы камер на Луну «Чайке» позволила дружная работа гироскопов, солнечных и лунного сенсоров
Нужная ориентация корпуса была получена и постоянно корректировалась с учетом траектории движения центра масс станции. Точно нацелиться на Луну объективам фотоаппаратов позволила информация от сенсора, улавливавшего лунный. Максимизируя его сигналы, компьютер скорректировал положение люка, скрывающего фотоаппаратуру «Луны-3» с погрешностью в 0,5 градуса.
Такое положение по отоношению к Луне заняла станция после завершения маневров ориентации

Так выглядит Луна, пойманная в объектив фотокатеры «Луны-3»
Кроме того, непосредственно перед съемкой «Чайка» придала станции кратковременное вращательное движение вдоль оси съемки, чтобы солнечные лучи равномерно прогрели ее корпус, и процессы химической обработки полученных снимков прошли без проблем.
"Луна-3". Начало эпохи управляемых полетов
Полученные «Луной-3» снимки обратной стороны Луны были не ахти какого качества. Это и понятно — сделанные на обычную фотопленку, они проявлялись прямо на борту станции, да и аппаратура их телепередачи методом бегущего луча (того самого, что применяется в современных сканерах) только начинала свое развитие. Но все это было не важно.
Полет «Луны-3» и выполненная ею на «пятерку» фотосессия земного спутника, во второй раз после запуска «Спутника-1» произвели эффект разорвавшейся бомбы. Шутка ли — в то время, как после ряда неудачных запусков микроспутников (Хрущев за маленький вес называл их «грейпфрутами») американского проекта "Авангард", 18 сентября 1959 года США успешно запускают двадцатитрёхкилограмовый «Vanguard-3» на высоту восемь тысяч километров, русские 4 октября того же года отправляют к Луне целую фотолабораторию «Луна-3» весом 287 килограммов. И не просто запускают, а успешно делают и передают снимки лунной поверхности.

Отправленный на орбиту месяцем раньше американский спутник «Vanguard-3» был в десять раз меньше «Луны-3»
Миссия «Луны-3» подстегнула настоящую космическую гонку двух супердержав. Именно она стала причиной увеличения ассигнований на развитие космических технологий и в США и в СССР. И именно благодаря ней в США появилось агентство NASA, а теория управления ориентацией космических аппаратов вышла на новый уровень развития.
Её первопроходец, система ориентации «Чайка» легла в основу множества систем управления межпланетными и пилотируемыми космическими кораблями. В лаборатории Раушенбаха в семидесятые годы были разработаны и усовершенствованы системы ориентации станций «Марс» и «Венера», системы коррекции орбиты спутников Земли, а также системы автоматического и ручного управления и стыковки пилотируемых космических аппаратов.
На смену электромеханическому компьютеру «Чайки» пришли бортовые цифровые ЭВМ серии «Салют». А для ориентации над не освещенной Солнцем стороной Земли, была придумана система ИКВ — инфракрасной вертикали, сенсоры которой использовали инфракрасное излучение нашей планеты.
Бортовая цифровая ЭВМ «Салют-1» сменила электромеханический компьютер первой «Чайки»
Несмотря на всю автоматику систем ориентации космонавты до сих пор используют старую добрую навигацию по звездам с помощью секстанта
Вот что сказал о заслугах коллектива Раушенбаха в области управления ориентацией в космосе заместитель генерального директора НИИ Космического Приборостроения доктор технических наук Арнольд Селиванов: «Луна-3» — первый космический аппарат, для которого была разработана система ориентации в космическом пространстве. До этого искусственные спутники летали вокруг Земли, кувыркаясь на заданной орбите. Математические расчеты Раушенбаха позволили нацелить спутник на обратную сторону Луны. Без этой победы дальнейшее освоение космоса напоминало бы запуск воздушного змея — интересно, красиво и абсолютно бесполезно".
Исторический момент фотографирования обратной стороны Луны станцией «Луна-3» можно пережить самостоятельно и от первого лица. Достаточно скачать и установить симулятор космических полетов "Orbiter 2010", распространяющийся по свободной лицензии, и загрузить в него миссию "Луна-3".
К оглавлению
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Blue Waters: петафлопсовая матрёшка Евгений Лебеденко, Mobi.ru
Blue Waters: петафлопсовая матрёшка Евгений Лебеденко, Mobi.ru Опубликовано 09 августа 2011 года Суперкомпьютеры в мире вычислительных систем сродни олигархам в человеческом обществе. Вот вроде бы такие же люди, та же анатомия и физиология, ан нет — попасть в
Система PASS: софт для шаттла Евгений Лебеденко, Mobi.ru
Система PASS: софт для шаттла Евгений Лебеденко, Mobi.ru Опубликовано 02 августа 2011 года Если отладка — процесс удаления ошибок, то программирование должно быть процессом их внесения. Э. Дейкстра Порой, после очередного зависания
Стрелы времени: история хронометрирования Евгений Лебеденко, Mobi.ru
Стрелы времени: история хронометрирования Евгений Лебеденко, Mobi.ru Опубликовано 10 января 2012 года Время. Удивительно многогранная категория, нашедшая свое место и у физиков (мера движения материи, координата четырёхмерного пространства-времени), и у
Удивительные трубки мира Евгений Лебеденко, Mobi.ru
Удивительные трубки мира Евгений Лебеденко, Mobi.ru Опубликовано 16 ноября 2011 года Люди не часто интересуются историей создания тех вещей, которыми пользуются каждый день, поэтому интересные, а порой просто поразительные открытия по большей части
"Электроника МК-85": подковать калькулятор Евгений Лебеденко, Mobi.ru
"Электроника МК-85": подковать калькулятор Евгений Лебеденко, Mobi.ru Опубликовано 17 августа 2011 года "Сюда пришли люди, которым было приятнее быть друг с другом,чем порознь, которые терпеть не могли всякого рода воскресений, потомучто в
Калькулятор Mathatron: первый программируемый Евгений Лебеденко, Mobi.ru
Калькулятор Mathatron: первый программируемый Евгений Лебеденко, Mobi.ru Опубликовано 13 декабря 2011 года Порой история становления технологии напоминает спринтерский забег. В краткий промежуток времени суммируются повышенный пользовательский интерес,
Лилипьютеры: компьютерная микрофауна в вашей розетке Евгений Лебеденко, Mobi.ru
Лилипьютеры: компьютерная микрофауна в вашей розетке Евгений Лебеденко, Mobi.ru Опубликовано 16 мая 2011 года На прошлогодней конференции D8 глава компании Apple Стив Джобс провёл границу двух исторических эпох компьютерных технологий. Цифровой мир
SNIPER: светлое будущее кремниевой нанофотоники Евгений Лебеденко, Mobi.ru
SNIPER: светлое будущее кремниевой нанофотоники Евгений Лебеденко, Mobi.ru Опубликовано 28 июля 2011 года Глядя на недавний анонс «железных» новинок от Apple, так и хочется сказать, что новые технологии словно тропическая зелень: ещё вчера был маленький
Технология Gyricon: забытый электронный папирус Евгений Лебеденко, Mobi.ru
Технология Gyricon: забытый электронный папирус Евгений Лебеденко, Mobi.ru Опубликовано 30 мая 2011 года "Закончив чтение, он заложил между страницами использованную карточку метро и захлопнул электронную книгу".Сегодня, когда электронные книги из
Две памяти инженера Бобека Евгений Лебеденко, Mobi.ru
Две памяти инженера Бобека Евгений Лебеденко, Mobi.ru Опубликовано 13 июля 2011 года Зачастую незримый вершитель судеб во вселенной информационных технологий, отобрав шанс у одной из них, возвращает его спустя какое-то время. Мол, ну что же, тогда я был не
Две памяти инженера Бобека (часть 2) Евгений Лебеденко, Mobi.ru
Две памяти инженера Бобека (часть 2) Евгений Лебеденко, Mobi.ru Опубликовано 14 июля 2011 года Это продолжение статьи. Начало читайте здесь. Bubble memory. Укрощение строптивого... магнитного поля Неудачи с твистор памятью не сломили исследовательский
In/Out-сайдеры: кто не с нами? Евгений Лебеденко, Mobi.ru
In/Out-сайдеры: кто не с нами? Евгений Лебеденко, Mobi.ru Опубликовано 09 июня 2011 года Демонстрируя новинки, компании так и норовят покрепче прижать своих врагов. Если смотреть презентации по отдельности, то волей-неволей проникаешься аргументацией
Tertium datur: другие компьютеры Евгений Лебеденко, Mobi.ru
Tertium datur: другие компьютеры Евгений Лебеденко, Mobi.ru Опубликовано 29 декабря 2011 года "Наука умеет много гитик". Это карточное высказывание как нельзя лучше подходит к истории разработки троичных компьютеров «Сетунь». Хотя бы потому, что, создавая их,
Предварительный обзор ОС Android 3.0 Honeycomb Евгений Лебеденко, Mobi
Предварительный обзор ОС Android 3.0 Honeycomb Евгений Лебеденко, Mobi Опубликовано 09 февраля 2011 годаСпустя год после выхода легендарной системы iOS 3.2, на которой заработал самый популярный планшет в мире, другой лидер рынка мобильных платформ, компания Google, пробует повторить успех
Как появилась первая игровая приставка Евгений Лебеденко, Mobi
Как появилась первая игровая приставка Евгений Лебеденко, Mobi Опубликовано 15 марта 2011 годаНынешняя битва Xbox 360, Wii и Playstation 3 — далеко не первый виток в длительной и напряжённой «гонке вооружений» индустрии компьютерных игр. Началась она ещё в семидесятые годы прошлого
Telautograph: месть Cерого кардинала Евгений Лебеденко, Mobi.ru
Telautograph: месть Cерого кардинала Евгений Лебеденко, Mobi.ru Опубликовано 03 апреля 2012 года Летним вечером 1884 года известный вашингтонский юрист Бойд Крамрайн встречался в своём доме с одноклассником по бриджпортской высшей школе Генри Беннетом.