Более простая версия функции str_cli
Более простая версия функции str_cli
Неблокируемая версия функции str_cli, которую мы только что показали, нетривиальна: около 135 строк кода по сравнению с 40 строками версии, использующей функцию select с блокируемым вводом-выводом (см. листинг 6.2), и 20 строками начальной версии, работающей в режиме остановки и ожидания (см. листинг 5.4). Мы знаем, что эффект от удлинения кода в два раза, с 20 до 40 строк оправдывает затраченные усилия, поскольку в пакетном режиме скорость возрастает почти в 30 раз, а применение функции select с блокируемыми дескрипторами осуществляется не слишком сложно. Но будут ли оправданы затраченные усилия при написании приложения, использующего неблокируемый ввод-вывод, с учетом усложнения итогового кода? Нет, ответим мы. Если нам необходимо использовать неблокируемый ввод-вывод, обычно бывает проще разделить приложение либо на процессы (при помощи функции fork), либо на потоки (см. главу 26).
В листинге 16.6 показана еще одна версия нашей функции str_cli, разделяемая на два процесса при помощи функции fork.
Эта функция сразу же вызывает функцию fork для разделения на родительский и дочерний процессы. Дочерний процесс копирует строки от сервера в стандартный поток вывода, а родительский процесс — из стандартного потока ввода серверу, как показано на рис. 16.4.
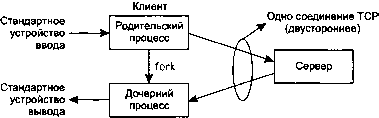
Рис. 16.4. Функция str_cli, использующая два процесса
Мы показываем, что соединения TCP являются двусторонними и что родительский и дочерний процессы совместно используют один и тот же дескриптор сокета: родительский процесс записывает в сокет, а дочерний процесс читает из сокета. Есть только один сокет, один буфер приема сокета и один буфер отправки, но на этот сокет ссылаются два дескриптора: один в родительском процессе и один в дочернем.
Листинг 16.6. Версия функции str_cli, использующая функцию fork
//nonblock/strclifork.c
1 #include "unp.h"
2 void
3 str_cli(FILE *fp, int sockfd)
4 {
5 pid_t pid;
6 char sendline[MAXLINE], recvline[MAXLINE];
7 if ((pid = Fork()) == 0) { /* дочерний процесс: сервер -> stdout */
8 while (Readline(sockfd, recvline, MAXLINE) > 0)
9 Fputs(recvline, stdout);
10 kill(getppid(), SIGTERM); /* в случае, если родительский процесс
все еще выполняется */
11 exit(0);
12 }
13 /* родитель: stdin -> сервер */
14 while (Fgets(sendline, MAXLINE, fp) != NULL)
15 Writen(sockfd, sendline, strlen(sendline));
16 Shutdown(sockfd, SHUT_WR); /* конец файла на stdin, посылаем FIN */
17 pause();
18 return;
19 }
Нам нужно снова вспомнить о последовательности завершения соединения. Обычное завершение происходит, когда в стандартном потоке ввода встречается конец файла. Родительский процесс считывает конец файла и вызывает функцию shutdown для отправки сегмента FIN. (Родительский процесс не может вызвать функцию close, см. упражнение 16.1.) Но когда это происходит, дочерний процесс должен продолжать копировать от сервера в стандартный поток вывода, пока он не получит признак конца файла на сокете.
Также возможно, что процесс сервера завершится преждевременно (см. раздел 5.12), и если это происходит, дочерний процесс считывает признак конца файла на сокете. В таком случае дочерний процесс должен сообщить родительскому, что нужно прекратить копирование из стандартного потока ввода в сокет (см. упражнение 16.2). В листинге 16.6 дочерний процесс отправляет родительскому процессу сигнал SIGTERM, в случае, если родительский процесс еще выполняется (см. упражнение 16.3). Другим способом обработки этой ситуации было бы завершение дочернего процесса, и если родительский процесс все еще выполнялся бы к этому моменту, он получил бы сигнал SIGCHLD.
Родительский процесс вызывает функцию pause, когда заканчивает копирование, что переводит его в состояние ожидания того момента, когда будет получен сигнал. Даже если родительский процесс не перехватывает никаких сигналов, он все равно переходит в состояние ожидания до получения сигнала SIGTERM от дочернего процесса. По умолчанию действие этого сигнала — завершение процесса, что вполне устраивает нас в этом примере. Родительский процесс ждет завершения дочернего процесса, чтобы измерить точное время для этой версии функции str_cli. Обычно дочерний процесс завершается после родительского, но поскольку мы измеряем время, используя команду оболочки time, измерение заканчивается, когда завершается родительский процесс.
Отметим простоту этой версии по сравнению с неблокируемым вводом-выводом, представленным ранее в этом разделе. Наша неблокируемая версия управляла четырьмя различными потоками ввода-вывода одновременно, и поскольку все четыре были неблокируемыми, нам пришлось иметь дело с частичным чтением и частичной записью для всех четырех потоков. Но в версии с функцией fork каждый процесс обрабатывает только два потока ввода-вывода, копируя из одного в другой. В применении неблокируемого ввода-вывода не возникает необходимости, поскольку если нет данных для чтения из потока ввода, то и в соответствующий поток вывода записывать нечего.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Шаг первый: простая страница
Шаг первый: простая страница Вначале бралась обычная страница, для которой использовалось только gzip-сжатие HTML-файла. Это самое простое, что может быть сделано для ускорения загрузки страницы. Данная оптимизация бралась за основу, с которой сравнивалось все остальное. Для
5.5. Эхо-клиент TCP: функция str_cli
5.5. Эхо-клиент TCP: функция str_cli Эта функция, показанная в листинге 5.4, обеспечивает отправку запроса клиента и прием ответа сервера в цикле. Функция считывает строку текста из стандартного потока ввода, отправляет ее серверу и считывает отраженный ответ сервера, после чего
6.4. Функция str_cli (продолжение)
6.4. Функция str_cli (продолжение) Теперь мы можем переписать нашу функцию str_cli, представленную в разделе 5.5 (на этот раз используя функцию select), таким образом, чтобы мы получали уведомление, как только завершится процесс сервера. Проблема с предыдущей версией состояла в том,
6.7. Функция str_cli (еще раз)
6.7. Функция str_cli (еще раз) В листинге 6.2 представлена наша обновленная (и корректная) функция str_cli. В этой версии используются функции select и shutdown. Первая уведомляет нас о том, когда сервер закрывает свой конец соединения, а вторая позволяет корректно обрабатывать пакетный
Сравнение времени выполнения различных версий функции str_cli
Сравнение времени выполнения различных версий функции str_cli Итак, мы продемонстрировали четыре различных версии функции str_cli. Для каждой версии мы покажем время, которое потребовалось для ее выполнения, в том числе и для версии, использующей программные потоки (см.
26.3. Использование потоков в функции str_cli
26.3. Использование потоков в функции str_cli В качестве первого примера использования потоков мы перепишем нашу функцию str_cli. В листинге 16.6 была представлена версия этой функции, в которой использовалась функция fork. Напомним, что были также представлены и некоторые другие
Глава 4 Простая
Глава 4 Простая В этой главе рассматриваются модификаторы и составные объекты. Действие модификаторов направлено на изменение формы объекта, взаимодействие двух объектов приводит к созданию третьего – составного. Моделирование с использованием модификаторов и
9.2. Простая ассемблерная вставка
9.2. Простая ассемблерная вставка Вот как с помощью функции asm() осуществляется сдвиг числа на 8 битов вправо:asm("shrl $8, %0" : "=r" (answer) : "r" (operand) : "cc");Выражение в скобках состоит из секций, разделенных двоеточиями. В первой секции указана ассемблерная инструкция и ее операнды.
Первая простая реализация
Первая простая реализация При разработке очереди по приоритету первый атрибут (возможность хранения произвольного количества элементов) наталкивает на мысль об использовании какой-либо расширяемой структуры данных типа связного списка или расширяемого массива,
Вторая простая реализация
Вторая простая реализация Однако при наличии большого количества элементов или при добавлении и удалении из очереди большого количества элементов она оказывается не столь эффективной, как хотелось бы. Уверен, что читатели сразу подумали об одном возможном способе
Пример 22-1. Простая функция
Пример 22-1. Простая функция #!/bin/bashfunky (){ echo "Это обычная функция."} # Функция должна быть объявлена раньше, чем ее можно будет использовать. # Вызов функции.funkyexit 0Функция должна быть объявлена раньше, чем ее можно будет использовать. К сожалению, в Bash нет возможности
Простая архитектура PKI
Простая архитектура PKI Архитектура PKI может быть очень простой, если у пользователей - простые требования. В этом разделе рассматриваются два типа простой архитектуры: одиночный УЦ и списки доверия УЦ. Простая архитектура достаточна для связывания пользователей одного и