Модель блокируемого ввода-вывода
Модель блокируемого ввода-вывода
Наиболее распространенной моделью ввода-вывода является модель блокируемого ввода-вывода, которую мы использовали для всех предыдущих примеров. По умолчанию все сокеты являются блокируемыми. Используя в наших примерах сокет дейтаграмм, мы получаем сценарий, показанный на рис. 6.1.
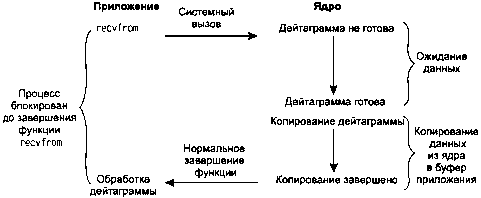
Рис. 6.1. Модель блокируемого ввода-вывода
В этом примере вместо TCP мы используем UDP, поскольку в случае UDP признак готовности данных очень прост: получена вся дейтаграмма или нет. В случае TCP он становится сложнее, поскольку приходится учитывать дополнительные переменные, например минимальный объем данных в сокете (low water-mark).
В примерах этого раздела мы говорим о функции recvfrom как о системном вызове, поскольку делаем различие между нашим приложением и ядром. Вне зависимости от того, как реализована функция recvfrom (как системный вызов в ядре, происходящем от Беркли, или как функция, активизирующая системный вызов getmsg в ядре System V), она обычно выполняет переключение между работой в режиме приложения и работой в режиме ядра, за которым через определенный промежуток времени следует возвращение в режим приложения.
На рис. 6.1 процесс вызывает функцию recvfrom, и системный вызов не возвращает управление, пока дейтаграмма не придет и не будет скопирована в буфер приложения либо пока не произойдет ошибка. Наиболее типичная ошибка — это прерывание системного вызова сигналом, о чем рассказывалось в разделе 5.9. Процесс блокирован в течение всего времени с момента, когда он вызывает функцию recvfrom, до момента, когда эта функция завершается. Когда функция recvfrom выполняется нормально, наше приложение обрабатывает дейтаграмму.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
4.1. Введение в модель ввода/вывода Linux/Unix
4.1. Введение в модель ввода/вывода Linux/Unix Модель API Linux/Unix для ввода/вывода проста. Ее можно суммировать четырьмя словами. открыть, прочитать, записать, закрыть. Фактически, это имена системных вызовов: open(), read(), write(), close(). Вот их объявления:#include <sys/types.h> /* POSIX */#include <sys/stat.h>
Планировщики ввода-вывода
Планировщики ввода-вывода Простая отправка запросов на устройство ввода-вывода в том же порядке, в котором эти запросы направляет ядро, приводит к очень плохой производительности. Одна из наиболее медленных операций, которые вообще могут быть в компьютере,— это поиск по
Система ввода-вывода
Система ввода-вывода Ввод-вывод — это Родни Дэнжерфилд[ 76 ] (Rodney Dangerfield) вычислительных систем: на него никто не обращает внимания. Всеобщий любимчик — процессор, а подсистема ввода-вывода рядом с ним — падчерица. Вот пример: когда надо охарактеризовать производительность
Операции ввода-вывода в AS/400
Операции ввода-вывода в AS/400 Теперь от аппаратной архитектуры ввода-вывода AS/400 перейдем к совместной работе OS/400, SLIC и аппаратуры при выполнении операции ввода-вывода для прикладной программы. Сначала рассмотрим объекты, поддерживающие ввод-вывод, затем — многоуровневую
Компоненты ввода-вывода
Компоненты ввода-вывода 4 Денис! Эту сноску — на поля! Таблица по старому изданию, сравнить с новым. Для верстальщика: по-моему, стоит убрать рамку — будет красивееТаблица 10.1. Язык ввода-вывода AMQ Очередь свободных сообщений BCT Таблица управления шиной BCU Устройство
Модель неблокируемого ввода-вывода
Модель неблокируемого ввода-вывода Когда мы определяем сокет как неблокируемый, мы тем самым сообщаем ядру следующее: «когда запрашиваемая нами операция ввода-вывода не может быть завершена без перевода процесса в состояние ожидания, следует не переводить процесс в
Модель мультиплексирования ввода-вывода
Модель мультиплексирования ввода-вывода В случае мультиплексирования ввода-вывода мы вызываем функцию select или poll, и блокирование происходит в одном из этих двух системных вызовов, а не в действительном системном вызове ввода-вывода. На рис. 6.3 обобщается модель
Модель ввода-вывода, управляемого сигналом
Модель ввода-вывода, управляемого сигналом Мы можем сообщить ядру, что необходимо уведомить процесс о готовности дескриптора с помощью сигнала SIGIO. Такая модель имеет название ввод-вывод, управляемый сигналом (signal-driven I/O). Она представлена в обобщенном виде на рис. 6.4. Рис.
Модель асинхронного ввода-вывода
Модель асинхронного ввода-вывода Асинхронный ввод-вывод был введен в редакции стандарта POSIX.1g 1993 г. (расширения реального времени). Мы сообщаем ядру, что нужно начать операцию и уведомить нас о том, когда вся операция (включая копирование данных из ядра в наш буфер)
5.4.1. Потоки ввода-вывода
5.4.1. Потоки ввода-вывода Когда программа запускается на выполнение, в ее распоряжение предоставляются три потока (или канала): • стандартный ввод (standard input или stdin). По этому каналу данные передаются программе; • стандартный вывод (standard output или stdout). По этому каналу
5.2. Перенаправление ввода/вывода
5.2. Перенаправление ввода/вывода Практически все операционные системы обладают механизмом перенаправления ввода/вывода, и Linux не является исключением из этого правила. Обычно программы вводят текстовые данные с консоли (терминала) и выводят данные на консоль. При вводе
19.7.2. Перенаправление ввода/вывода
19.7.2. Перенаправление ввода/вывода Перенаправление ввода/вывода уже рассматривалось в гл. 5, поэтому я лишь напомню общий формат команд:команда > (>>) файлсписок > (>>) файлКак вы уже знаете, при использовании одного знака больше файл, в который переназначен вывод,
3.4.6. Потоки ввода-вывода
3.4.6. Потоки ввода-вывода Как я уже сказал, каждому процессу сопоставлена таблица открытых им файлов. Три первых позиции в этой таблице заняты всегда: каждый процесс открывает потоки (помните, что в UNIX файл — это и есть поток данных?) для ввода и вывода данных, а также вывода
7.2.2.3. Планировщик ввода-вывода
7.2.2.3. Планировщик ввода-вывода В ядре 2.6 появилась возможность самостоятельно выбирать планировщик ввода-вывода. Всего используется четыре плани-ровщика.• noop - самый простой планировщик ввода-вывода, практически ничего не умеет, создавался в расчете на использование
Подпрограммы ввода-вывода
Подпрограммы ввода-вывода procedure Read(a,b,...); Вводит значения a,b,... с клавиатуры procedure Readln(a,b,...); Вводит значения a,b,... с клавиатуры и осуществляет переход на следующую строку function ReadInteger: integer; Возвращает значение типа integer, введенное с клавиатуры function ReadReal: