Управление передачей данных
Управление передачей данных
Деление процесса передачи данных на два этапа, выполняемых, соответственно, функциями xxput() и xxservice(), позволяет реализовать механизм управления передачей данных.
Как уже упоминалось, обязательной для модуля является лишь функция xxput(). Рассмотрим ситуацию, когда модули потока не содержат процедур xxservice(). В этом случае, проиллюстрированном на рис. 5.19, каждый предыдущий модуль вызывает функцию xxput() следующего, передавая ему сообщение, с помощью функции ядра putnext(9F). Функция xxput() немедленно вызывает putnext(9F) и т.д.:
xxput(queue_t *q, mblk_t *mp) {
putnext(q, mp);
}
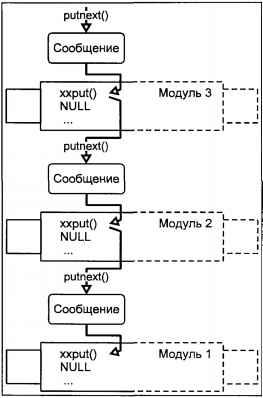
Рис. 5.19. Передача данных без управления потоком
Когда данные достигают драйвера, он передает их непосредственно устройству. Если устройство занято, или драйвер не может немедленно обработать данные, сообщение уничтожается. В данном примере никакого управления потоком не происходит, и очереди сообщений не используются.
Хотя такой вариант может применяться для некоторых драйверов (как правило, для псевдоустройств, например, /dev/null), в общем случае устройство не может быть все время готово к обработке данных, а потеря данных из-за занятости устройства недопустима. Таким образом, в потоке может происходить блокирование передачи данных[60], и эта ситуация не должна приводить к потере сообщений, во избежание которой необходим согласованный между модулями механизм управления потоком. Для этого сообщения обрабатываются и буферизуются в соответствующей очереди модуля, а их передача возлагается на функцию xxservice(), вызываемую ядром автоматически. Для каждой очереди определены две ватерлинии — верхняя и нижняя, которые используются для контроля заполненности очереди. Если число сообщений превышает верхнюю ватерлинию, очередь считается переполненной, и передача сообщений блокируется, пока их число не станет меньше нижней ватерлинии.
Рассмотрим пример потока, модули 1 и 3 которого поддерживают управление потоком данных, а модуль 2 — нет. Другими словами, модуль 2 не имеет процедуры xxservice(). Когда сообщение достигает модуля 3, вызывается его функция xxput(). После необходимой обработки сообщения, оно помещается в очередь модуля 3 с помощью функции putq(9F). Если при этом число сообщений в очереди превышает верхнюю ватерлинию, putq(9F) устанавливает специальный флаг, сигнализирующий о том, что очередь переполнена:
mod1put(queue_t* q, mblk_t* mp) {
/* Необходимая обработка сообщения */
...
putq(q, mp);
}
Через некоторое время ядро автоматически запускает процедуру xxservice() модуля 3. Для каждого сообщения очереди xxput() вызывает функцию canput(9F), которая проверяет заполненность очереди следующего по потоку модуля. Функция canput(9F) имеет вид:
#include <sys/stream.h>
int canput(queue_t* q);
Заметим, что canput(9F) проверяет заполненность очереди следующего модуля, реализующего механизм управления передачей данных, т.е. производящего обработку очереди с помощью процедуры xxservice(). В противном случае, как уже говорилось, очередь модуля не принимает участия в передаче данных. В нашем примере, canput(9F) проверит заполненность очереди записи модуля 1. Функция возвращает истинное значение, если очередь может принять сообщение, и ложное — в противном случае. В зависимости от результата проверки процедура xxservice() либо передаст сообщение следующему модулю (в нашем примере — модулю 2, который после необходимой обработки сразу же передаст его модулю 1), либо вернет сообщение обратно в очередь, если следующая очередь переполнена.
Описанная схема показана на рис. 5.20. Ниже приведен скелет процедуры xxservice() модуля 3, иллюстрирующий описанный алгоритм передачи сообщений с использованием механизма управления передачей данных.
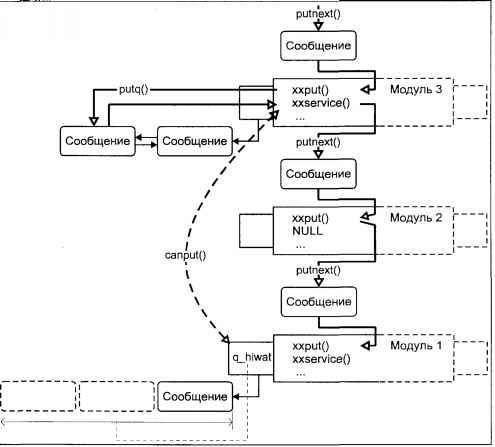
Рис. 5.20. Управление потоком данных
mod1service(queue_t *q) {
mblk_t* mp;
while ((mp = getq(q)) != NULL) {
if (canput(q->q_next))
putnext(q, mp);
else {
putbq(q, mp);
break;
}
}
В этом примере функция getq(9F) используется для извлечения следующего сообщения из очереди, а функция putbq(9F) — для помещения сообщения в начало очереди. Если модуль 1 блокирует передачу, т.е. canput(9F) вернет "ложно", процедура xxservice() завершает свою работу, и сообщения начинают буферизоваться в очереди модуля 3. При этом очередь временно исключается из списка очередей, ожидающих обработки, и процедура xxservice() для нее вызываться не будет. Данная ситуация продлится до тех пор, пока число сообщений очереди записи модуля 1 не станет меньше нижней ватерлинии.
Пока существует возникшая блокировка передачи, затор будет постепенно распространяться вверх по потоку, последовательно заполняя очереди модулей, пока, в конечном итоге, не достигнет головного модуля. Поскольку передачу данных в головной модуль (вниз по потоку) инициирует приложение, попытка передать данные в переполненный головной модуль вызовет блокирование процесса[61] и переход его в состояние сна.
В конечном итоге, модуль 1 обработает сообщения своей очереди, и их число станет меньше нижней ватерлинии. Как только очередь модуля 1 станет готовой к приему новых сообщений, планировщик STREAMS автоматически вызовет процедуры xxservice() для модулей, ожидавших освобождения очереди модуля в нашем примере — для модуля 3.
Управление передачей данных в потоке требует согласованной работы всех модулей. Например, если процедура xxput() буферизует сообщения для последующей обработки xxservice(), такой алгоритм должен выполняться для всех сообщений.[62] В противном случае, это может привести к нарушению порядка сообщений, и как следствие, к потере данных.
Когда запускается процедура xxservice(), она должна обработать все сообщения очереди. "Уважительной" причиной прекращения обработки является переполнение очереди следующего по потоку модуля. В противном случае нарушается механизм управления передачей, и очередь может навсегда лишиться обработки.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Управление хранилищем данных
Управление хранилищем данных Метаданные — это данные о данных. Они используются для управления хранилищем данных. Существуют две формы метаданных — технические и бизнес-данные. Первые содержат описания оперативной базы данных и хранилища данных, что позволяет
Управление базой данных
Управление базой данных Можно настроить автоматическую или ручную очистку быстрорастущих таблиц raw и monitor при помощи этих нехитрых SQL–команд:delete from raw where t_to < unix_timestamp(date_add(now(), interval–6 MONTH));delete from monitor where time < unix_timestamp(date_add(now(), interval–6 MONTH));При этом удаляются записи, которым
2.5. SCRIPT: протокол управления передачей потоков
2.5. SCRIPT: протокол управления передачей потоков Сервисы, предоставляемые SCRIPT, имеют много общего с сервисами TCP и UDP. Протокол SCRIPT описывается в RFC 2960 [118] и RFC 3309 [119]. Введение в SCRIPT приводится в RFC 3286 [85]. SCRIPT ориентирован на создание ассоциаций между клиентами и серверами. Кроме
4.2 Функции физического уровня, управление доступом к физическому носителю и уровень связи данных
4.2 Функции физического уровня, управление доступом к физическому носителю и уровень связи данных В этой главе мы рассмотрим работу IP поверх различных технологий нижнего уровня. Однако сначала обратимся к происходящим на этих уровнях событиям (см. рис. 4.1). Рис. 4.1. Функции
Экспорт данных из базы данных Access 2007 в список SharePoint
Экспорт данных из базы данных Access 2007 в список SharePoint Access 2007 позволяет экспортировать таблицу или другой объект базы данных в различных форматах, таких как внешний файл, база данных dBase или Paradox, файл Lotus 1–2–3, рабочая книга Excel 2007, файл Word 2007 RTF, текстовый файл, документ XML
Перемещение данных из базы данных Access 2007 на узел SharePoint
Перемещение данных из базы данных Access 2007 на узел SharePoint Потребности многих приложений Access 2007 превышают простую потребность в управлении и сборе данных. Часто такие приложения используются многими пользователями организации, а значит, имеют повышенные потребности в
Глава 7 Управление хранилищем данных
Глава 7 Управление хранилищем данных Эффективное управление хранилищами данных в сфере современных информационных технологий играет все более важную роль. Основные проблемы перечислены далее.Увеличение объемов хранения требует расширения административного штата,
Управление наборами данных с помощью объектов Collection
Управление наборами данных с помощью объектов Collection Если нужно работать с наборами элементов информации, создайте для этой информации объект Collection (Коллекция). Как уже говорилось в главе 12, в VBA родовой класс Collection предназначен для хранения практически всего, что только
Управление базами данных с помощью VBA
Управление базами данных с помощью VBA Если вы собираетесь использовать VBA для работы с данными, хранящимися в "реальных" базах данных типа файлов Microsoft Jet (формат баз данных, используемыхAccess), SQL Server или dBase, то вам, мой друг, определенно потребуется помощь. И придет она от
Глава 2 Управление базой данных с помощью SQL
Глава 2 Управление базой данных с помощью SQL Из этой главы вы узнаете, как работать с данными в СУБД MySQL, как определять их структуру, а также как добавлять, изменять и удалять данные. Эти операции выполняет SQL – универсальный язык структурированных запросов, являющийся
Обновление базы данных с помощью объекта адаптера данных
Обновление базы данных с помощью объекта адаптера данных Адаптеры данных могут не только заполнять для вас таблицы объекта DataSet. Они могут также поддерживать набор объектов основных SQL-команд, используя их для возвращения модифицированных данных обратно в хранилище