Кивино гнездо: Найти иголку в океане Киви Берд
Кивино гнездо: Найти иголку в океане
Киви Берд
Опубликовано 12 мая 2011 года
Во Францию доставлены для изучения поднятые со дна океана бортовые самописцы авиалайнера Air France 447, два года назад потерпевшего катастрофу при весьма загадочных обстоятельствах.

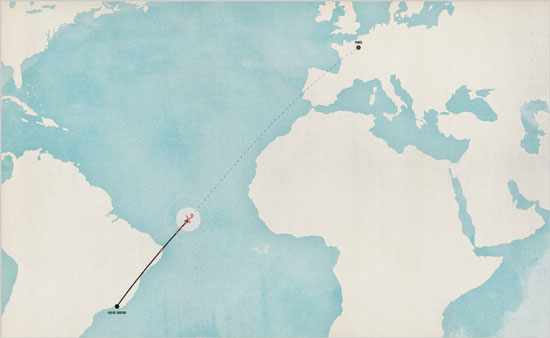
Трагически оборвавшийся полёт был регулярным авиарейсом компании Air France из Рио-де-Жанейро в Париж, проходившим в ночь с 31 мая на 1 июня 2009 года. Когда самолёт летел над Атлантическим океаном, уже покинув зону радарного слежения Бразилии, но ещё не войдя в сенегальское воздушное пространство у берегов Западной Африки, радиосвязь с бортом была потеряна. Никаких сигналов бедствия от экипажа не поступало, а последним радиосообщением с самолёта была серия автоматических передач бортового компьютера, извещавших о цепочке отказов в работе оборудования.
Через несколько дней на поверхности океана в тысяче с лишним километров от бразильского побережья удалось найти несколько десятков тел погибших и некоторые предметы, однозначно указывавшие на место гибели AF447. Ни «чёрных ящиков», ни существенных фрагментов самолёта на дне океана не обнаружилось, поэтому причина катастрофы, унесшей жизни двухсот шестнадцати пассажиров и двенадцати членов экипажа, осталась неустановленной.
В поисковых операциях принимали участие корабли, мини-субмарины и даже атомная подводная лодка ВМС Франции ?meraude (тогда ещё был шанс отловить акустический сигнал маячков-пингеров от бортовых самописцев самолёта с помощью её чувствительных сонаров). В 2010 году к прочёсыванию дна присоединились специалисты WHOI, американского Института океанографических исследований Вудс Хоул (Вудс Хоул Oceanographic Institute), у которых имелись подходящее оборудование и большой опыт использования автономных роботов-субмарин. Однако все усилия были напрасны.
Последняя попытка отыскать останки рейса AF447 была предпринята этой весной. Команда института Вудс Хоул покинула Бразилию и направилась к месту поисков 22 марта 2011 года. Вполне возможно, что эта операция стала бы последней, даже если бы самолёт так и не удалось найти. Намеченная для сканирования территория была весьма и весьма обширной, но случилось так, что работать исследователям на месте поисков довелось лишь чуть меньше недели. Третьего апреля на глубине порядка 4,3 километра им удалось-таки обнаружить обломки пропавшего самолёта – посреди ровной долины в подводной горном массиве.
Учитывая огромное количество усилий, затраченных всеми прежними поисковыми командами на отыскание AF447, естественно задаться вопросом: чем же именно нынешние поиски отличались от всех предыдущих? Что такого особенного смогла сделать команда WHOI, чего не могли сделать все прочие поисковые группы? Или же это просто удача?

Ответы можно получить непосредственно от руководителя экспедиции Майка Пёрселла (Mike Purcell), в Вудс Хоул занимающего должность главного инженера, которого с пристрастием расспросила американская журналистка Мэгги Кёрт-Бейкер (Maggie Koerth-Baker). В свободном пересказе «отчёт» Пёрселла об этой их поисковой операции выглядит примерно так.
Хотя история института насчитывает уже восемьдесят лет, использованием роботов в глубоководных исследованиях там занимаются последние лет пятнадцать. Для разработки подводных автономных дронов в институте имеется специальная лаборатория. Полтора десятка лет исследований – для любой области срок немалый, однако в WHOI никогда не торопились и в реальных поисковых операциях начали принимать участие лишь с 2008 года.
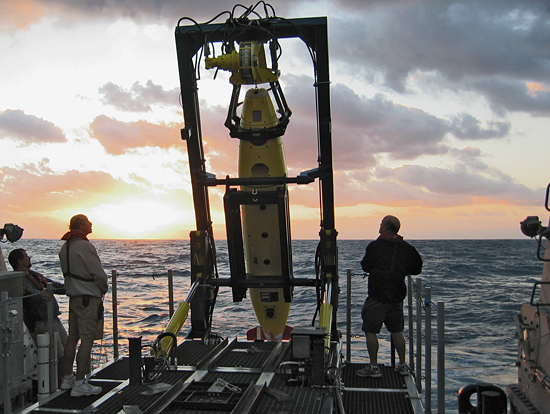
Основной «рабочей лошадкой» исследователей сейчас является автономная субмарина Remus 6000, по виду напоминающая жёлтую торпеду диаметром около семидесяти сантиметров и длиной чуть менее четырёх метров. Официально этот робот-субмарина называется Remus 6000 AUV (от Autonomous Underwater Vehicle – «автономный подводный аппарат»), а создан он компанией Hydroid в сотрудничестве со специалистами WHOI и ONR Управления военно-морских исследований США.

Первый аппарат такого рода появился в 2001 году. Одно из важнейших достоинств этого подводного дрона – возможность работы на глубине до шести тысяч метров. По свидетельству Пёрселла, эта особенность делает аппарат уникальным. На шесть «Ремусов 6000», которые на сегодняшний день имеются в мире, сейчас, вероятно, приходится больше миссий, чем на любую другую модель глубоководных автономных роботов-субмарин.
В распоряжении WHOI имеется несколько «Ремусов 6000», причём сами сотрудники института являются и их операторами. Несколько лет назад эта техника участвовала в поисках самолёта легендарной женщины-пилота Амелии Эрхарт. В 2010 году исследователи WHOI занимались картографированием места гибели «Титаника», а затем – теперь уже дважды – «Ремусам» довелось участвовать в поисках AF447.
Перед началом поисковой операции «Ремус 6000» получает «программу миссии», то есть, попросту говоря, маршрут движения. Затем робот отправляется под воду и использует различные навигационные технологии, чтобы плыть по заданному маршруту. Аппарат полностью автономен, и нет никого, кто мог бы активно управлять его действиями. При этом дрон далеко не так «умён», как может показаться. Он не способен, к примеру, принимать решения на основе особенностей ландшафта – кроме как держаться на некоторой заранее заданной высоте над уровнем дна. Он не умеет самостоятельно обходить или избегать препятствия, возникающие перед ним по ходу движения.
Руководствуясь картой рельефа дна, такие аппараты огибают горные вершины и хребты, но если что-то пойдёт не так, «Ремус 6000» вполне способен уткнуться в препятствие и застрять. У этих машин нет полноценного набора сенсоров и независимой программы ориентации, которыми снабжены некоторые полностью автономные роботы. Одна из причин заключается в том, что ориентироваться в воде сложнее, чем на воздухе. По сути дела, под водой разработчики дрона ограничены лишь одним видом сенсоров – акустическими датчиками.
AF447 искали в районе Срединно-Атлантического хребта — месте с настолько сложным рельефом, что его иногда называют подводными Гималаями. Скептики сомневались, что там возможно найти хоть что-то. Поскольку для аккуратного сканирования требуется выдерживать постоянную дистанцию до дна, роботы-субмарины должны двигаться в соответствии с рельефом – то есть вверх и вниз по этим горам. Кое-где дно находится на глубине свыше четырёх километров (примерно там в итоге и был обнаружен самолёт). Однако всего в нескольких километрах от этого места глубина может измениться всего до двух километров, а горы имеют довольно крутые склоны.
В принципе, говорит Пёрселл, у них имелась неплохая контурная карта морского дна, однако в реальности, когда в конкретном месте опускаешь подводный аппарат под воду, всегда узнаёшь что-то новое. Так что время от времени дрон непременно утыкается в какую-нибудь не отмеченную на карте гору или скалу. В некоторых случаях, когда такое случается, приходится останавливать миссию. Для этого необходимо сбросить балласт, и тогда дрон всплывает на поверхность. А порой столкновение приводит к проблемам, которые проявляются лишь парой погружений позднее.
Иногда склон горы уходит вниз так круто, что субмарина просто физически не может двигаться вдоль дна под тем же углом, поэтому хороших данных сканирования не получается. Тогда исследователям приходится возвращаться и запускать робота ещё раз, но уже в другом направлении, чтобы он не двигался вниз по склону, а взбирался вверх.
Главной трудностью оказалась небывало большая территория обследования — порядка семнадцати тысяч квадратных километров, причём поначалу было совершенно неясно, откуда начинать поиски. Этой весной исследователи надеялись прочесать участок площадью семь тысяч квадратных километров. Между тем с помощью пары «Ремусов» удаётся отсканировать лишь порядка ста квадратных километров дна в день. Успеть больше можно лишь в том случае, когда дно плоское; при действительно плоской поверхности дна удавалось, бывало, сканировать и по 180 квадратных километров...
Основным отличием в этом году стало то, что исследователи решили не опираться на малодостоверные сведения о местных океанских течениях, а просто начали поиск от того места, где последний раз была отмечена позиция самолёта.
Помимо явно удачной идеи об исходной точке для начала новых поисков, большую роль в быстром успехе сыграла и правильная организация работ. На этот раз у поисковой команды имелось три аппарата «Ремус 6000» и двенадцать человек для их сопровождения, работающих двенадцатичасовыми сменами. То есть в каждой смене было занято по шесть человек, занимающихся такими вещами, как извлечение аппаратов из воды и запуск их обратно в океан, перепрограммирование роботов, постоянное отслеживание их местоположения. При такой постановке дела в воде всегда находилась пара «Ремусов», а также всегда был человек, занимавшийся обработкой данных от роботов.
О живой видеотрансляции океанского дна и речи не шло. По большому счёту, весь поиск происходил практически вслепую. Пока робот под водой, поисковая команда на запустившем его корабле получает лишь краткие статусные сообщения. То есть акустические послания, периодически поступающие от робота и сообщающие его текущую глубину плюс долготу и широту географических координат, – просто отчёты о состоянии движения, дающие знать, всё ли идет нормально или же возникли какие-то проблемы.
Когда подводный робот возвращается с задания, уходит около 45 минут на то, чтобы скачать данные из его памяти, и затем ещё полчаса, чтобы их обработать и просмотреть на мониторе. В течение этого времени другая команда меняет аккумуляторные батареи и готовит аппарат к возврату на глубину. При идеальном раскладе робот извлекается из воды на три часа, пока кто-то просматривает данные, чтобы решить, куда двигаться дальше и есть ли на дне места, которые следовало бы просканировать ещё раз. Когда в работе находятся сразу три аппарата, то дампы данных поступают три раза в сутки.
По словам Пёрселла, исследователи получают для анализа изображения, выстраиваемые по данным акустического сканирования дна. Аппаратура дрона посылает акустический сигнал каждую секунду, и тот уходит на семьсот метров во всех направлениях. Возвращённые сигналы накапливаются и превращаются в изображение. Такое сканирование аппарат осуществляет в автономном плавании примерно на протяжении двадцати часов.
Понятно, что при такой технологии сканирования на экране оказывается совершенно не то, что люди видят при видеосъёмке. Речь идёт, скорее, об абстрактном представлении неких аномальных особенностей ландшафта. Искомая вещь обычно выглядит как отчётливое скопление ярких точек в том месте, где их, вообще говоря, быть не должно. По сути дела, как поясняет Пёрселл, исследователей интересуют множества маленьких ярких точек на достаточно большой площади морского дна (на двадцатичетырёхдюймовом мониторе умещается полоса дна шириной 1400 метров).
Хороших алгоритмов для автоматизации такой работы пока нет, а для того, чтобы научиться распознавать представленные подобным образом данные, требуется время. Особенно опыт необходим в тех ситуациях, когда анализируются сложные поверхности с переменным ландшафтом. Понимание того, что выглядит на экране естественно, а что неестественно, приходит к человеку постепенно. Металлические предметы, к примеру, часто обладают резкими или прямоугольными краями и потому отражают более сильный сигнал, чем, скажем, скалы с гранями, которые сглажены миллионами лет, проведёнными на дне океана.
В случае с AF447, впрочем, умение отличать скалы не потребовалось. Самолёт лежал посреди совершенно плоской области без каких-либо естественных особенностей рельефа, которые могли бы затруднить обнаружение.

По мнению Пёрселла, другие команды тоже могли бы найти останки самолёта там, где они в итоге обнаружились, будь то с помощью других подводных аппаратов или даже с помощью простых систем сканирования, буксируемых кораблями. Однако, если взглянуть на более широкую картину, на всю ту огромную область дна, которую требовалось просканировать, то дроны «Ремус 6000», по его мнению, были самым лучшим инструментом для работы в такого рода ландшафтах. Важен и тот факт, что в работе задействовали сразу три таких аппарата, непрерывно работавших круглыми сутками. Плюс, конечно, человеческий фактор – люди, непосредственно и грамотно руководившие поисками с подводных роботов. Всё это не только существенно повысило производительность поисков, но и обусловило успех операции.
Причём итоги этой работы видятся важными не только для расследования обстоятельств гибели AF447. Вместе с окончанием поисков самолёта можно констатировать, что учёными-океанографами собран гигантский объём новых данных об исследованном регионе. Они уже частично переданы мировому научному сообществу и в недалёком будущем окажутся в его распоряжении целиком.
Комментируя эти – побочные, так сказать, – результаты их поисков, Пёрселл подчеркивает, что не является геологом и потому не может компетентно разъяснить, что будут делать с этими данными специалисты. Однако, напомнил он, гигантские площади океанского дна по сию пору практически полностью остаются не обследованными. Поверхность Луны известна человеку куда лучше, чем поверхность дна океанов на Земле.
В ходе нынешних поисков проведено подробное картографирование площади дна порядка 1500 квадратных миль, то есть примерно пять тысяч квадратных километров Срединно-Атлантического хребта. И можно предполагать, что там обнаруживается много интересных подробностей о сложной географии этого региона.
К оглавлению
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Кивино гнездо: Непроизносимо Берд Киви
Кивино гнездо: Непроизносимо Берд Киви Опубликовано 27 июля 2010 года Каждый год, когда дело доходит до летней хакерской конференции Black Hat в Лас-Вегасе, одна из самых волнующих тем — это какие из докладов оказались сняты на этот раз. Ибо так уж устроен
Кивино гнездо: Шпион в кармане Берд Киви
Кивино гнездо: Шпион в кармане Берд Киви На прошедшей в Бостоне, США, конференции по инфобезопасности SOURCE Boston 2010 один из самых интересных докладов был посвящен уязвимостям сетей мобильной телефонной связи. Два калифорнийских исследователя, Дон Бейли (Don Bailey)
Кивино гнездо: В постели со шпионами Берд Киви
Кивино гнездо: В постели со шпионами Берд Киви Опубликовано 10 августа 2010 года В первых числах августа глава корпорации Google Эрик Шмидт сделал довольно любопытный доклад на конференции Techonomy (т.е. «технологии + экономика»). С трибуны этого форума,
Кивино гнездо: Виртуальная реальность сна Киви Берд
Кивино гнездо: Виртуальная реальность сна Киви Берд Опубликовано 12 января 2012 года Сегодня уже никому, наверное, не нужно объяснять, что представляет собой генерируемая с помощью компьютеров виртуальная реальность, или VR. А также то, насколько
Кивино гнездо: Что-то происходит... Киви Берд
Кивино гнездо: Что-то происходит... Киви Берд Опубликовано 22 августа 2011 годаПримерно через месяц, с 30 сентября по 2 октября 2011, в городе Орландо (штат Флорида, США) будет проходить в высшей степени неординарное мероприятие под названием 100 Year Starship Study Public Symposium («Общественный
Кивино гнездо: О чём скандал? Берд Киви
Кивино гнездо: О чём скандал? Берд Киви Начиная с первого мая сего года в Китае вступили в силу интересные правила, обязывающие поставщиков компьютерно-сетевого обеспечения предоставлять властям всю информацию об имеющихся в их продуктах технологиях
Кивино гнездо: Для всех и даром Киви Берд
Кивино гнездо: Для всех и даром Киви Берд Опубликовано 28 июля 2011 года Крайне странный в юридической практике случай с жесточайшим преследованием интернет-активиста Аарона Шварца наметился в США. По оценкам местной прокуратуры, этому молодому
Кивино гнездо: На звон БитМонет Киви Берд
Кивино гнездо: На звон БитМонет Киви Берд Опубликовано 01 июня 2011 года Люди задумались о замечательных потенциальных возможностях технологий электронных взаимных расчётов практически одновременно с появлением интернета. Ранние системы
Кивино гнездо: Зачем вам думать? Киви Берд
Кивино гнездо: Зачем вам думать? Киви Берд Опубликовано 03 июня 2011 года На проходившей в последних числах мая в Японии выставке Open House 2011, посвящённой высоким технологиям для дома и быта, местные умельцы представили довольно любопытную разработку
Кивино гнездо: «ЭТО не кончится никогда» Киви Берд
Кивино гнездо: «ЭТО не кончится никогда» Киви Берд Опубликовано 19 декабря 2011 года Исторические события, как известно, часто ходят кругами. Иногда бывает так, что начинается всё как подлинная драма, а затем повторяется как фарс. А порой бывает и так,
Кивино гнездо: Голос недоверия Берд Киви
Кивино гнездо: Голос недоверия Берд Киви Опубликовано 13 мая 2010 года Очередная весьма поучительная история об электронных системах безбумажного голосования на этот раз непосредственно касается Индии. Или «крупнейшей на данной планете
Кивино гнездо: Кто, где, когда Киви Берд
Кивино гнездо: Кто, где, когда Киви Берд Опубликовано 19 июля 2011 года На проходившей недавно в США конференции MobiSys 2011 (Девятая международная конференция по мобильным системам, приложениям и сервисам, 28 июня — 1 июля 2011, Вашингтон) несложно было
Кивино гнездо: Ещё раз про Stuxnet Берд Киви
Кивино гнездо: Ещё раз про Stuxnet Берд Киви Опубликовано 27 января 2011 года За несколько первых недель 2011 года череда независимых друг от друга событий сложилась таким образом, что общая картина вокруг загадочного компьютерного червя Stuxnet стала
Кивино гнездо: Псевдоархеология Берд Киви
Кивино гнездо: Псевдоархеология Берд Киви Опубликовано 26 мая 2010 года В одном из недавних выпусков газеты The New York Times была опубликована довольно большая статья об интересном и весьма плодотворном приложении современных технологий лазерного
Кивино гнездо: Псевдоархеология, часть II Берд Киви
Кивино гнездо: Псевдоархеология, часть II Берд Киви Опубликовано 27 мая 2010 года (Первую часть истории можно найти здесь.) Этого не может быть Причина, по которой официальная наука археологов и историков продолжает категорически отрицать сам факт
Кивино гнездо: За что боролись БЕРД КИВИ
Кивино гнездо: За что боролись БЕРД КИВИ В середине февраля этого года на сайте полиции г. Дубаи, Объединенные Арабские Эмираты, в его англоязычном разделе появилась примерно такая вот информация об объявленных в международный розыск преступниках — с их фотографиями и