25.3. Эхо-сервер UDP с использованием сигнала SIGIO
25.3. Эхо-сервер UDP с использованием сигнала SIGIO
В этом разделе мы приведем пример, аналогичный правой части рис. 25.1: UDP-сервер, использующий сигнал SIGIO для получения приходящих дейтаграмм. Этот пример также иллюстрирует использование надежных сигналов стандарта POSIX.
В данном случае клиент совсем не изменен по сравнению с листингами 8.3 и 8.4, а функция сервера main не изменилась по сравнению с листингом 8.1. Единственные внесенные изменения касаются функции dg_echo, которая будет приведена в следующих четырех листингах. В листинге 25.1[1] представлены глобальные объявления.
Листинг 25.1. Глобальные объявления
//sigio/dgecho01.c
1 #include "unp.h"
2 static int sockfd;
3 #define QSIZE 8 /* размер входной очереди */
4 #define MAXDG 4096 /* максимальный размер дейтаграммы */
5 typedef struct {
6 void *dg_data; /* указатель на текущую дейтаграмму */
7 size_t dg_len; /* длина дейтаграммы */
8 struct sockaddr *dg_sa; /* указатель на sockaddr{} с адресом клиента */
9 socklen_t dg_salen; /* длина sockaddr{} */
10 } DG;
11 static DG dg[QSIZE]; /* очередь дейтаграмм для обработки */
12 static long cntread[QSIZE +1]; /* диагностический счетчик */
13 static int iget; /* следующий элемент для обработки в основном цикле */
14 static int iput; /* следующий элемент для считывания обработчиком
сигналов */
15 static int nqueue; /* количество дейтаграмм в очереди на обработку
в основном цикле */
16 static socklen_t clilen; /* максимальная длина sockaddr{} */
17 static void sig_io(int);
18 static void sig_hup(int);
Очередь принимаемых дейтаграмм
3-12 Обработчик сигнала SIGIO помещает приходящие дейтаграммы в очередь. Эта очередь является массивом структур DG, который интерпретируется как кольцевой буфер. Каждая структура содержит указатель на принятую дейтаграмму, ее длину и указатель на структуру адреса сокета, содержащую адрес протокола клиента и размер адреса протокола. В памяти размещается столько этих структур, сколько указано в QSIZE (в данном случае 8), и в листинге 25.2 будет видно, что функция dg_echo для размещения в памяти всех структур дейтаграмм и адресов сокетов вызывает функцию malloc. Также происходит выделение памяти под диагностический счетчик cntread, который будет рассмотрен чуть ниже. На рис. 25.2 приведен массив структур, при этом предполагается, что первый элемент указывает на 150-байтовую дейтаграмму, а длина связанного с ней адреса сокета равна 16.
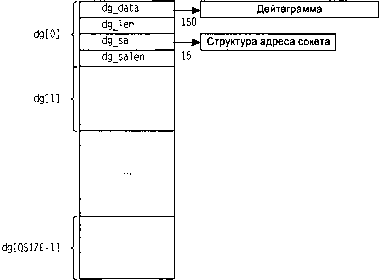
Рис. 25.2. Структуры данных, используемые для хранения прибывающих дейтаграмм и структур адресов их сокетов
Индексы массивов
13-15 Переменная iget является индексом следующего элемента массива для обработки в основном цикле, а переменная iput — это индекс следующего элемента массива, в котором сохраняется результат действия обработчика сигнала. Переменная nqueue обозначает полное количество дейтаграмм, предназначенных для обработки в основном цикле.
В листинге 25.2 показан основной цикл сервера — функция dg_echo.
Листинг 25.2. Функция dg_echo: основной обрабатывающий цикл сервера
//sigio/dgecho01.c
19 void
20 dg_echo(int sockfd_arg, SA *pcliaddr, socklen_t clilen_arg)
21 {
22 int i;
23 const int on = 1;
24 sigset_t zeromask, newmask, oldmask;
25 sockfd = sockfd_arg;
26 clilen = clilen_arg;
27 for (i = 0; i < QSIZE; i++) { /* инициализация очереди */
28 dg[i].dg_data = Malloc(MAXDG);
29 dg[i].dg_sa = Malloc(clilen);
30 dg[i].dg_salen = clilen;
31 }
32 iget = iput = nqueue = 0;
33 Signal(SIGHUP, sig_hup);
34 Signal(SIGIO, sig_io);
35 Fcntl(sockfd, F_SETOWN, getpid());
36 Ioctl(sockfd, FIOASYNC, &on);
37 Ioctl(sockfd. FIONBIO, &on);
38 Sigemptyset(&zeromask); /* инициализация трех наборов сигналов */
39 Sigemptyset(&oldmask);
40 Sigemptyset(&newmask);
41 Sigaddset(&newmask, SIGIO); /* сигнал, который хотим блокировать*/
42 Sigprocmask(SIG_BLOCK, &newmask, &oldmask);
43 for (;;) {
44 while (nqueue == 0)
45 sigsuspend(&zeromask); /* ждем дейтаграмму для обработки */
46 /* разблокирование SIGIO */
47 Sigprocmask(SIG_SETMASK, &oldmask, NULL);
48 Sendto(sockfd, dg[iget].dg_data, dg[iget].dg_len, 0,
49 dg[iget].dg_sa, dg[iget].dg_salen);
50 if (++iget >= QSIZE)
51 iget = 0;
52 /* блокировка SIGIO */
53 Sigprocmask(SIG_BLOCK, &newmask, &oldmask);
54 nqueue--;
55 }
56 }
Инициализация очереди принятых дейтаграмм
27-32 Дескриптор сокета сохраняется в глобальной переменной, поскольку он необходим обработчику сигналов. Происходит инициализация очереди принятых дейтаграмм.
Установка обработчиков сигналов и флагов сокетов
33-37 Для сигналов SIGHUP (он используется для диагностических целей) и SIGIO устанавливаются обработчики. С помощью функции fcntl задается владелец сокета, а с помощью функции ioctl устанавливаются флаги ввода-вывода, управляемого сигналом, и неблокируемого ввода-вывода.
ПРИМЕЧАНИЕ
Ранее отмечалось, что для разрешения ввода-вывода, управляемого сигналом, в POSIX применяется флаг O_ASYNC функции fcntl, но поскольку большинство систем пока его не поддерживают, мы используем функцию ioctl. Поскольку большинство систем не поддерживают флаг O_NONBLOCK для включения неблокируемого ввода-вывода, здесь также рассмотрен вариант использования функции ioctl.
Инициализация наборов сигналов
38-41 Инициализируется три набора сигналов: zeromask (никогда не изменяется), oldmask (хранит старую маску сигнала, когда SIGIO блокируется) и newmask. Функция sigaddset включает в набор newmask бит, соответствующий SIGIO.
Блокирование SIGIO и ожидание дальнейших действий
42-45 Функция sigprocmask сохраняет текущую маску сигналов процесса в oldmask, а затем выполняет логическое сложение, сравнивая newmask с текущей маской сигналов. Такие действия блокируют сигнал SIGIO и возвращают текущую маску сигналов. Далее мы заходим в цикл for и проверяем счетчик nqueue. Пока этот счетчик равен нулю, ничего делать не нужно, и мы вызываем функцию sigsuspend. Эта функция POSIX, сохранив в одной из локальных переменных текущую маску сигналов, присваивает текущей маске значение аргумента zeromask. Так как zeromask является пустым набором сигналов, то разрешается доставка любых сигналов. Как только перехватывается сигнал и завершается обработчик, функция sigsuspend также завершается. (Это необычная функция, поскольку она всегда возвращает ошибку EINTR.) Прежде чем завершиться, функция sigsuspend всегда устанавливает такое значение маски сигналов, которое предшествовало ее вызову (в данном случае newmask). Таким образом гарантируется, что, когда функция sigsuspend возвращает значение, сигнал SIGIO блокирован. Именно поэтому можно проверять счетчик nqueue, поскольку известно, что пока он проверяется, сигнал SIGIO не может быть доставлен.
ПРИМЕЧАНИЕ
А что произойдет, если сигнал SIGIO не будет блокирован во время проверки переменной nqueue, используемой совместно основным циклом и обработчиком сигналов? Может случиться так, что проверка nqueue покажет нулевое значение, а сразу после проверки возникнет сигнал и nqueue станет равна 1. Далее мы вызовем функцию sigsuspend и перейдем в режим ожидания, в результате чего пропустим сигнал. После вызова функции sigsuspend мы не выйдем из режима ожидания, пока не поступит другой сигнал. Это похоже на ситуацию гонок, описанную в разделе 20.5
Разблокирование SIGIO и отправка ответа
46-51 Разблокируем сигнал SIGIO с помощью вызова sigprocmask, чтобы вернуть маске сигналов процесса значение, сохраненное ранее (oldmask). В этом случае ответ посылается с помощью функции sendto. Индекс iget увеличился на 1, и если его значение совпадает с количеством элементов массива, он снова обнуляется. Массив используется как кольцевой буфер. Обратите внимание, что нет необходимости блокировать сигнал SIGIO во время изменения переменной iget, поскольку этот индекс используется только в основном цикле и никогда не изменяется обработчиком сигнала.
Блокирование SIGIO
52-54 Сигнал SIGIO блокируется, а значение переменной nqueue уменьшается на 1. Во время изменения данной переменной необходимо заблокировать сигнал, поскольку она используется совместно основным циклом и обработчиком сигнала. Также необходимо, чтобы сигнал SIGIO был заблокирован, когда в начале цикла происходит проверка переменной nqueue.
Альтернативным способом является удаление обоих вызовов функции sigprocmask, находящихся внутри цикла for, что предотвращает разблокирование сигнала и его последующее блокирование. Однако проблема состоит в следующем: в такой ситуации весь цикл выполняется при блокированном сигнале, что уменьшает быстроту реагирования обработчика сигнала. При этом дейтаграммы не будут теряться (если, конечно, буфер приема сокета достаточно велик), но выдача сигнала процессу будет задерживаться на время блокирования сигнала. Одной из задач при создании приложений, производящих обработку сигналов, должна быть минимизация времени блокирования сигнала.
Листинг 25.3. Обработчик сигнала SIGIO
//sigio/dgecho01.c
57 static void
58 sig_io(int signo)
59 {
60 ssize_t len;
61 int nread;
62 DG *ptr;
63 for (nread = 0;;) {
64 if (nqueue >= QSIZE)
65 err_quit("receive overflow");
66 ptr = &dg[iput];
67 ptr->dg_salen = clilen;
68 len = recvfrom(sockfd, ptr->dg_data, MAXDG, 0,
69 ptr->dg_sa, &ptr->dg_salen);
70 if (len < 0) {
71 if (errno == EWOULDBLOCK)
72 break; /* все сделано; очередь на чтение отсутствует */
73 else
74 err_sys("recvfrom error");
75 }
76 ptr->dg_len = len;
77 nread++;
78 nqueue++;
79 if (++iput >= QSIZE)
80 iput = 0;
81 }
82 cntread[nread]++; /* гистограмма количества дейтаграмм.
считанных для каждого сигнала */
83 }
Во время создания этих обработчиков сигналов была обнаружена следующая проблема: в стандарте POSIX сигналы обычно не помещаются в очередь. Это означает, что если во время пребывания внутри обработчика сигналов (при этом сигнал заведомо заблокирован) возникает еще два сигнала, то сигнал доставляется еще один раз.
ПРИМЕЧАНИЕ
В стандарте POSIX предусмотрено несколько сигналов реального времени, для которых обеспечивается буферизация, однако ряд других сигналов, в том числе и SIGIO, обычно не буферизуются, то есть не помещаются в очередь на доставку.
Рассмотрим следующий сценарий. Прибывает дейтаграмма и выдается сигнал. Обработчик сигнала считывает дейтаграмму и помещает ее в очередь к основному циклу. Но во время работы обработчика сигнала приходят еще две дейтаграммы, вызывая генерацию сигнала еще дважды. Поскольку сигнал блокирован, то когда обработчик сигналов возвращает управление после обработки первого сигнала, он запустится снова всего лишь один раз. После второго запуска обработчик считывает вторую дейтаграмму, а третья будет оставлена в очереди приходящих дейтаграмм сокета. Эта третья дейтаграмма будет прочитана, только если (и только когда) придет четвертая. Когда придет четвертая дейтаграмма, считана и поставлена в очередь на обработку основным циклом будет именно третья, а не четвертая дейтаграмма.
Поскольку сигналы не помещаются в очередь, дескриптор, установленный для управляемого сигналом ввода-вывода, обычно переводится в неблокируемый режим. Обработчик сигнала SIGIO мы кодируем таким образом, чтобы он считывал дейтаграммы в цикле, который прерывается, только когда при считывании возвращается ошибка EWOULDBLOCK.
Проверка переполнения очереди
64-65 Если очередь переполняется, происходит завершение работы. Для обработки такой ситуации существуют и другие способы (например, можно размещать в памяти дополнительные буферы), но для данного примера достаточно простого завершения.
Чтение дейтаграммы
66-76 На неблокируемом сокете вызывается функция recvfrom. Элемент массива, обозначенный индексом iput, — это то место, куда записывается дейтаграмма. Если нет дейтаграмм, которые нужно считывать, мы выходим из цикла for с помощью оператора break.
Увеличение счетчиков и индекса на единицу
77-80 Переменная nread является диагностическим счетчиком количества дейтаграмм, читаемых на один сигнал. Переменная nqueue — это количество дейтаграмм для обработки основным циклом.
82 Прежде чем обработчик сигналов возвращает управление, он увеличивает счетчик на единицу в соответствии с количеством дейтаграмм, прочитанных за один сигнал. Этот массив распечатывается программой в листинге 25.4 и представляет собой диагностическую информацию для обработки сигнала SIGHUP.
Последняя функция (листинг 25.4) представляет собой обработчик сигнала SIGHUP, который выводит массив cntread. Он считает количество дейтаграмм, прочитанных за один сигнал.
Листинг 25.4. Обработчик сигнала SIGHUP
//sigio/dgecho01.c
84 static void
85 sig_hup(int signo)
86 {
87 int i;
88 for (i = 0; i <= QSIZE; i++)
89 printf("cntread[%d] = %ld ", i, cntread[i]);
90 }
Чтобы проиллюстрировать, что сигналы не буферизуются и что в дополнение к установке флага, указывающего на управляемый сигналом ввод-вывод, необходимо перевести сокет в неблокируемый режим, запустим этот сервер с шестью клиентами одновременно. Каждый клиент посылает серверу 3645 строк (для отражения). При этом каждый клиент запускается из сценария интерпретатора в фоновом режиме, так что все клиенты стартуют приблизительно одновременно. Когда все клиенты завершены, серверу посылается сигнал SIGHUP, в результате чего сервер выводит получившийся массив cntread:
linux % udpserv01
cntread[0] = 2
cntread[1] = 21838
cntread[2] = 12
cntread[3] = 1
cntread[4] = 0
cntread[5] = 1
cntread[6] = 0
cntread[7] = 0
cntread[8] = 0
Большую часть времени обработчик сигналов читает только одну дейтаграмму, но бывает, что готово больше одной дейтаграммы. Ненулевое значение счетчика cntread[0] получается потому, что сигнал генерируется в процессе выполнения клиента. Мы считываем дейтаграммы в цикле обработчика сигнала. Дейтаграмма, прибывшая во время считывания других дейтаграмм, будет считана вместе с этими дейтаграммами (в том же вызове обработчика), а сигнал об ее прибытии будет отложен и доставлен процессу после завершения обработчика. Это приведет к повторному вызову обработчика, но считывать ему будет нечего (отсюда cntread[0]>0). Наконец, можно проверить, что взвешенная сумма элементов массива (21 838?1 + 12?2 + 1?3+1?5=21 870) равна 6?3645 (количество клиентов ? количество строк клиента).
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Традиционная обработка сигнала
Традиционная обработка сигнала В этой части изложения мы рассмотрим традиционные модели перехвата сигналов и установки для них собственных обработчиков (в том числе и игнорирование или восстановление стандартной обработки по умолчанию). Термин «традиционный» здесь
«Старая» модель обработки сигнала
«Старая» модель обработки сигнала В ранних версиях UNIX была принята единственная модель обработки сигналов, основанная на функции signal(), которая подразумевает семантику так называемых «ненадежных сигналов», принятую в этих ОС. Позже эта модель была подвержена
12.1.1. Жизненный цикл сигнала
12.1.1. Жизненный цикл сигнала Сигналы имеют четко определенный жизненный цикл: они создаются, сохраняются до тех пор, пока ядро не выполнит определенное действие на основе сигнала, а затем вызывают совершение этого действия. Создание сигнала называют по-разному: поднятие
12.7.1. Получение контекста сигнала
12.7.1. Получение контекста сигнала Информация о том, как и почему был сгенерирован сигнал, называется контекстом[68] сигнала. Приложения, которые должны видеть этот контекст, используют обработчики сигналов, отличающиеся от нормальных. Они включают два дополнительных
20.2. Выдача звукового сигнала
20.2. Выдача звукового сигнала Заставить консоль генерировать звуковой сигнал в течение определенного периода времени на указанной частоте совсем не сложное дело. Для этого существуют два способа. Первый состоит во включении или отключении постоянной тональной посылки.
Отправление сигнала
Отправление сигнала Ядро генерирует и отправляет процессу сигнал в ответ на ряд событий, которые могут быть вызваны самим процессом, другим процессом, прерыванием или какими-либо внешними событиями. Можно выделить основные причины отправки сигнала: Особые
Доставка и обработка сигнала
Доставка и обработка сигнала Для каждого сигнала в системе определена обработка по умолчанию, которую выполняет ядро, если процесс не указал другого действия. В общем случае существуют пять возможных действий: завершить выполнение процесса (с созданием образа core и без),
5.9. Обработка сигнала SIGCHLD
5.9. Обработка сигнала SIGCHLD Назначение состояния зомби — сохранить информацию о дочернем процессе, чтобы родительский процесс мог ее впоследствии получить. Эта информация включает идентификатор дочернего процесса, статус завершения и данные об использовании ресурсов
Применение IPC в обработчике сигнала функции
Применение IPC в обработчике сигнала функции Существует еще один корректный путь решения нашей проблемы. Вместо того чтобы просто возвращать управление и, как мы надеемся, прерывать блокированную функцию recvfrom, наш обработчик сигнала при помощи средств IPC (Interprocess Communications
Сигнал SIGIO и сокеты UDP
Сигнал SIGIO и сокеты UDP Использовать ввод-вывод, управляемый сигналом, с сокетами UDP довольно легко. Сигнал генерируется в следующих случаях:? на сокет прибывает дейтаграмма;? на сокете возникает асинхронная ошибка.Таким образом, когда мы перехватываем сигнал SIGIO для
Сигнал SIGIO и сокеты TCP
Сигнал SIGIO и сокеты TCP К сожалению, использовать управляемый сигналом ввод-вывод для сокетов TCP почти бесполезно. Проблема состоит в том, что сигнал генерируется слишком часто, а само по себе возникновение сигнала не позволяет выяснить, что произошло. Как отмечается в [128, с.
16.14. Сервер kHTTPd — веб-сервер уровня ядра
16.14. Сервер kHTTPd — веб-сервер уровня ядра В операционной системе все процессы можно разделить на два типа: процессы уровня ядра и пользовательские процессы. Процесс уровня ядра запускается и работает очень быстро по сравнению с относительно неповоротливым
Пример A-5. encryptedpw: Передача файла на ftp-сервер, с использованием пароля
Пример A-5. encryptedpw: Передача файла на ftp-сервер, с использованием пароля #!/bin/bash# Модификация примера "ex72.sh", добавлено шифрование пароля.# Обратите внимание: этот вариант все еще нельзя считать безопасным,#+ поскольку в сеть пароль уходит в незашифрованном виде.# Используйте
26.2.2. Обнаружение сигнала
26.2.2. Обнаружение сигнала Некоторые сигналы можно захватить и выполнить соответствующие действия. Другие сигналы нельзя уловить. Например, если команда получает сигнал 9, пользователю не нужно предпринимать какие?либо действия.Если ограничиться написанием сценариев,
26.3.2. Захват сигнала и выполнение действий
26.3.2. Захват сигнала и выполнение действий Наиболее часто выполняемым действием является удаление временных файлов.В следующем сценарии с помощью команд df и ps непрерывно добавляется информация во временные файлы HOLD1.$$ и HOLD2.$$. Не забывайте, что символы $$ заменяют ID
Конвертеры сигнала
Конвертеры сигнала Рассмотрим второй, очень важный компонент системы спутникового телевидения – конвертер сигнала. Конвертер представляет собой небольшой электронный блок, находящийся в фокусе спутниковой антенны. Он собирает сигнал, отраженный от зеркала тарелки,
Стивенс Уильям Ричард
Просмотр ограничен
Смотрите доступные для ознакомления главы 👉