Концепция Тьюринга
Концепция Тьюринга
Попробуем представить себе устройство, предназначенное для выполнения некоторой (конечноопределенной) вычислительной процедуры. Каким могло бы быть такое устройство в общем случае? Мы должны быть готовы к некоторой идеализации и не должны обращать внимания на практические аспекты — мы на самом деле рассматриваем математическую идеализацию «машины». Нам нужно устройство, способное принимать дискретное множество различных возможных состояний, число которых конечно (хотя и может быть очень большим). Мы назовем их внутренними состояниями устройства. Однако мы не хотим, чтобы объем выполняемых на этом устройстве вычислений был принципиально ограничен. Вспомним описанный выше алгоритм Евклида. В принципе, не существует предельной величины числа, после которой алгоритм перестает работать. Этот алгоритм, или некая общая вычислительная процедура, будет тем же самым независимо от того, сколь велики числа, к которым он применяется. Естественно, для очень больших чисел выполнение процедуры может занять много времени и может потребоваться огромное количество «черновиков» для выполнения пошаговых вычислений. Но сам по себе алгоритм останется тем же конечным набором инструкций, сколь бы большими ни были эти числа.
Значит, несмотря на конечность числа внутренних состояний, наше устройство должно быть приспособлено для работы с входными данными неограниченного объема. Более того, устройство должно иметь возможность использовать внешнюю память неограниченного объема (наши «черновики») для хранения данных, необходимых для вычислений, а также уметь выдавать окончательное решение любого размера. Поскольку наше устройство имеет только конечное число различных внутренних состояний, мы не можем ожидать, что оно будет «хранить внутри себя» все внешние данные, равно как и результаты своих промежуточных вычислений. Напротив, оно должно обращаться только к тем данным и полученным результатам, с которыми оно работает непосредственно в настоящий момент, и уметь производить над ними требуемые (опять же, в данный момент) операции. Далее, устройство записывает результаты этих операций — возможно, в отведенной для этого внешней памяти — и переходит к следующему шагу. Именно неограниченные объемы входных данных, вычислений и окончательного результата говорят о том, что мы имеем дело с идеализированным математическим объектом, который не может быть реализован на практике (рис. 2.3).
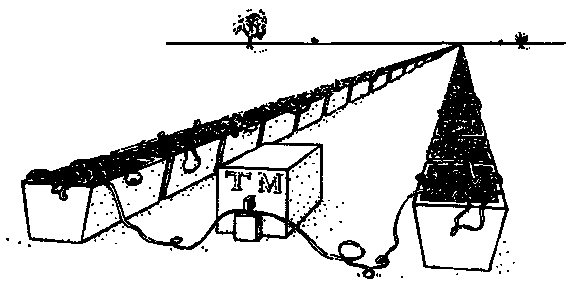
Рис. 2.3. Точная машина Тьюринга требует бесконечной ленты!
Но подобная идеализация является очень важной. Чудеса современных компьютерных технологий позволяют создавать электронные устройства хранения информации, которые мы можем рассматривать как неограниченные в приложении к большинству практических задач.
На самом деле память устройства, которая выше была названа «внешней», можно рассматривать как внутренний компонент современного компьютера. Но это уже технические детали — рассматривать часть объема для хранения информации как внутреннюю или внешнюю по отношению к устройству. Одним из способов проводить такое деление между «устройством» и «внешней» частью могло бы стать использование понятий аппаратного (hardware) и программного (software) обеспечения вычислений. В этой терминологии внутренняя часть могла бы соответствовать аппаратному обеспечению (hardware), тогда как внешняя — программному обеспечению (software). Я не буду жестко придерживаться именно этой классификации, однако, какую бы точку зрения мы не заняли, не вызывает сомнений, что идеализация Тьюринга достаточно точно аппроксимируется современными электронными компьютерами.
Тьюринг представлял внешние данные и объем для хранения информации в виде «ленты» с нанесенными на нее метками. Устройство по мере необходимости могло обращаться к этой ленте, «считывать» с нее информацию и перемещать ее вперед или назад в ходе выполнения операций. Помимо этого, устройство могло ставить новые метки на ленту и стирать с нее старые, что позволяло использовать одну и ту же ленту и как внешнюю память (то есть «черновик»), и как источник входных данных. На самом деле, не стоило бы проводить явное различие между этими двумя понятиями, поскольку во многих операциях промежуточные результаты вычислений могут играть роль новых исходных данных. Вспомним, что при использовании алгоритма Евклида мы раз за разом замещали исходные числа (А и В) результатами, полученными на разных этапах вычислений. Сходным образом та же самая лента может быть использована и для вывода окончательного результата («ответа»). Лента будет двигаться через устройство туда-сюда до тех пор, пока выполняются вычисления. Когда, наконец, все вычисления закончены, устройство останавливается, и результат вычислений отображается на части ленты, лежащей по одну сторону от устройства. Для определенности будем считать, что ответ всегда записывается на части ленты, расположенной слева от устройства, а все исходные числовые данные и условия задачи — на части ленты, расположенной справа от него.
Меня всегда несколько смущало представление о конечном устройстве, которое двигает потенциально бесконечную ленту вперед и назад. Неважно, насколько легок материал ленты — сдвинуть бесконечную ленту все-таки будет трудно! Вместо этого я предпочитаю представлять себе эту ленту как некое окружение, по которому может перемещаться наше конечное устройство. (Конечно же, в современных электронных устройствах ни «лента», ни само «устройство» не должны в обычном смысле физически «перемещаться», но представление о таком «движении» позволяет достичь известной наглядности.) При таком подходе устройство получает все входные данные из этого окружения, использует его в качестве «черновика» и, наконец, записывает в него конечный результат.
В представлении Тьюринга «лента» состоит из бесконечной в обоих направлениях линейной последовательности квадратов. Каждый квадрат либо пуст, либо помечен[41]. Использование помеченных и пустых квадратов означает, что мы допускаем разбиение нашего «окружения» (т. е. ленты) на части и возможность его описания множеством дискретных элементов (в противоположность непрерывному описанию). Это представляется вполне разумным, если мы хотим, чтобы наше устройство работало надежно и совершенно определенным образом. В силу используемой математической идеализации мы допускаем (потенциальную) бесконечность «окружения», однако в каждом конкретном случае входные данные, промежуточные вычисления и окончательный результат всегда должны быть конечными. Таким образом, хотя лента и имеет бесконечную длину, на ней должно быть конечное число непустых квадратов. Другими словами, и с той, и с другой стороны от устройства найдутся квадратики, после которых лента будет абсолютно пустой. Мы обозначим пустые квадраты символом «0», а помеченные — символом «1», например:

Нам нужно, чтобы устройство «считывало» информацию с ленты. Мы будем считать, что оно считывает по одному квадрату за раз и смещается после этого ровно на один квадрат влево или вправо. При этом мы не утрачиваем общности рассуждений: устройство, которое читает за один раз n квадратов или перемещается на k квадратов, легко моделируется устройством, указанным выше. Передвижение на k квадратов можно построить из к перемещений по одному квадрату, а считывание n квадратов за один прием сводится к запоминанию результатов n однократных считываний.
Что именно может делать такое устройство? Каким образом в самом общем случае могло бы функционировать устройство, названное нами «механическим»? Вспомним, что число внутренних состояний нашего устройства должно быть конечным. Все, что нам надо иметь в виду помимо этого — это то, что поведение нашего устройства полностью определяется его внутренним состоянием и входными данными. Входные данные мы упростили до двух символов — «0» и «1». При заданном начальном состоянии и таких входных данных устройство должно работать совершенно определенным образом: оно переходит в новое состояние (или остается в прежнем), заменяет считанный символ 0 или 1 тем же или другим символом 1 или 0, передвигается на один квадрат вправо или влево, и наконец, оно решает, продолжить вычисления или же закончить их и остановиться.
Чтобы явно определить операции, производимые нашим устройством, для начала пронумеруем его внутренние состояния, например: 0,1,2,3,4,5. Тогда действия нашего устройства, или машины Тьюринга, полностью определялись бы неким явным списком замен, например:
00 ? 00R
01 ? 131L
10 ? 651R
11 ? 10R
20 ? 01R.STOP
21 ? 661L
30 ? 370R
• •
• •
• •
2100 ? 31L
• •
• •
• •
2581 ? 00R.STOP
2590 ? 971R
2591 ? 00R.STOP
Выделенная цифра слева от стрелки — это символ на ленте, который устройство в данный момент считывает. Оно заменяет этот символ выделенной цифрой в середине справа от стрелки. R означает, что устройство должно переместиться вдоль ленты на один квадрат вправо, a L соответствует такому же перемещению влево. (Если, в соответствии с исходным представлением Тьюринга, мы полагаем, что движется не устройство, а лента, то R означает перемещение ленты на один квадрат влево, a L — вправо.) Слово STOP означает, что вычисления завершены и устройство должно остановиться. Например, вторая инструкция 01 ? 131L говорит о том, что если устройство находится в начальном состоянии 0 и считывает с ленты 1, то оно должно перейти в состояние 13, оставить на ленте тот же символ 1 и переместиться по ленте на один квадрат влево. Последняя же инструкция 2591 ? 00R.STOP говорит о том, что если устройство находится в состоянии 259 и считывает с ленты 1, то оно должно вернуться в состояние 0, стереть с ленты 1, т. е. записать в текущий квадрат 0, переместиться по ленте на один квадрат вправо и прекратить вычисления.
Вместо номеров 0, 1, 2, 3, 4, 5…. для обозначения внутренних состояний мы можем — и это более соответствовало бы знаковой системе нанесения меток на ленту — прибегнуть к системе нумерации, построенной только на символах «0» и «1». Состояние n можно было бы обозначить просто последовательностью из n единиц, но такая запись неэффективна. Вместо этого мы используем двоичную систему счисления, ставшую теперь общепринятой:
0 ? 0,
1 ? 1,
2 ? 10,
3 ? 11,
4 ? 100,
5 ? 101,
6 ? 110,
7 ? 111,
8 ? 1000,
9 ? 1001,
10 ? 1010,
11 ? 1011,
12 ? 1100 и т. д.
Здесь последняя цифра справа соответствует «единицам» точно так же, как и в стандартной (десятичной) системе записи, но цифра прямо перед ней показывает число «двоек», а не «десятков». В свою очередь третья цифра справа относится не к «сотням», а к «четверкам»; четвертая — к «восьмеркам», а не к «тысячам» и т. д. При этом разрядность каждой последующей цифры (по мере продвижения влево) дается соответственной степенью двойки: 1, 2, 4 (= 2 х 2), 8 (= 2 х 2 х 2), 16 (= 2х2х2х2), 32 (= 2x2x2х2х2). (В дальнейшем нам будет иногда удобно использовать в качестве основания системы счисления числа, отличные от «2» и «10». Например, запись десятичного числа 64 по основанию «три» даст 2101, где каждая цифра теперь — некоторая степень тройки:
64 = (2 х З3) + З2 + 1; см. главу 4).
Используя двоичную запись для внутренних состояний, можно представить вышеприведенную инструкцию, описывающую машину Тьюринга, следующим образом:
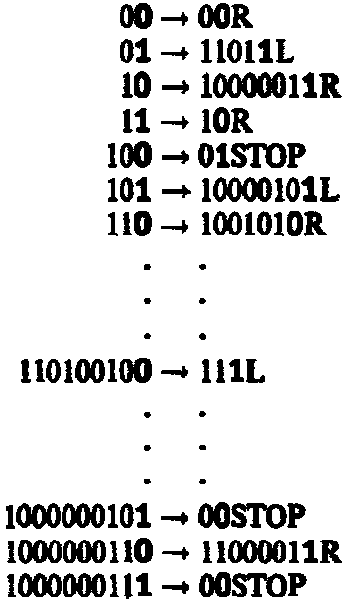
Здесь я к тому же сократил R.STOP до STOP, поскольку мы вправе считать, что L.STOP никогда не происходит, так как результат последнего шага вычислений, будучи частью окончательного ответа, всегда отображается слева от устройства.
Предположим, что наше устройство находится во внутреннем состоянии, представленном бинарной последовательностью 11010010, и процессу вычисления соответствует участок ленты, изображенный на предыдущем рисунке. Пусть мы задаем команду
110100100 ? 111L.
Та цифра на ленте, которая в данный момент считывается (в нашем случае цифра «0»), показана «жирным» символом справа от последовательности нулей и единиц, обозначающих внутреннее состояние.

В частично описанном выше примере машины Тьюринга (который я выбрал более-менее произвольно) считанный «0» был бы тогда замещен на «1», внутреннее состояние поменялось бы на «11» и устройство переместилось бы на один шаг влево:

Теперь устройство готово к считыванию следующей цифры, снова «0». Согласно таблице, оно оставляет этот «0» нетронутым, но изменяет свое внутреннее состояние на «100101» и передвигается по ленте назад, т. е. на один шаг вправо. Теперь оно считывает «1» и находит где-то ниже в таблице инструкцию, которая определяет изменение внутреннего состояния и указывает, должна ли быть изменена считанная цифра и в каком направлении по ленте должно дальше двигаться устройство. Таким образом устройство будет действовать до тех пор, пока не достигнет команды STOP. В этой точке — после еще одного шага вправо — раздастся звонок, оповещающий оператора о том, что вычисления завершены.
Мы будем считать, что машина всегда начинает с внутреннего состояния «0» и что вся лента справа от устройства изначально пуста. Все инструкции и данные подаются в устройство с правой стороны. Как упоминалось ранее, эта информация всегда имеет форму конечной строки из нулей и единиц, за которой следует пустая лента (т. е. нули). Когда машина получает команду STOP, результаты вычислений оказываются на ленте слева от считывающего устройства.
Поскольку мы хотели бы иметь возможность вводить в устройство и числовые данные, то нам потребуется некий способ описания обычных чисел (под которыми я здесь имею в виду целые неотрицательные числа 0, 1, 2, 3, 4….) как части входной информации. Для представления числа n можно было бы просто использовать строку из n единиц (хотя при этом могут возникнуть трудности, когда речь зайдет о нуле):
1 ? 1,
2 ? 11,
3 ? 111,
4 ? 1111,
5 ? 11111 и т. д.
Эта примитивная схема нумерации называется (хотя и довольно нелогично) унарной (единичной) системой. В этом случае символ 0 мог бы использоваться в качестве пробела для разделения двух разных чисел. Наличие такого способа разделения для нас существенно, так как многие алгоритмы оперируют не отдельными числами, а множествами чисел. Например, для выполнения алгоритма Евклида наше устройство должно производить определенные действия над парой чисел А и В. Соответствующая машина Тьюринга может быть легко записана в явном виде. В качестве упражнения заинтересованный читатель может проверить, что нижеследующий набор инструкций действительно описывает машину Тьюринга (которую я буду называть EUC), выполняющую алгоритм Евклида, если в качестве исходных данных использовать два «унарных» числа, разделенных символом 0:
00 ? 00R
01 ? 11L
10 ? 101R
11 ? 11L
100 ? 10100R
101 ? 110R
110 ? 1000R
111 ? 111R
1000 ? 1000R
1001 ? 1010R
1010 ? 1110L
1011 ? 1101L
1100 ? 1100L
1101 ? 11L
1110 ? 1110L
1111 ? 10001L
10000 ? 10010L
10001 ? 10001L
10010 ? 100R
10011 ? 11L
10100 ? 00.STOP
10101 ? 10101R
Однако я бы порекомендовал такому читателю начать не с этого упражнения, а с чего-нибудь гораздо более простого, например, с машины Тьюринга UN + 1, которая просто прибавляет единицу к числу в унарном представлении:
00 ? 00R
01 ? 11R
10 ? 01.STOP
11 ? 11R
Чтобы убедиться в том, что UN +1 на самом деле производит такую операцию, давайте мысленно применим ее, скажем, к ленте вида
…00000111100000…,
соответствующей числу четыре. Мы будем полагать, что наше устройство сначала находится где-то слева от последовательности единиц. Находясь в исходном состоянии 0, оно считывает 0, в соответствии с первой инструкцией сохраняет его неизмененным, после чего перемещается на шаг вправо, оставаясь во внутреннем состоянии 0. Оно продолжает последовательно передвигаться вправо до тех пор, пока не встретит первую единицу. После этого вступает в силу вторая инструкция: устройство оставляет единицу как есть и сдвигается на шаг вправо, но уже в состоянии 1. В соответствии с четвертой инструкцией оно сохраняет внутреннее состояние 1, равно как и все считываемые единицы, двигаясь вправо до встречи с первым после набора единиц нулем. Тогда начинает действовать третья инструкция, согласно которой устройство заменяет этот нуль на 1, перемещается на один шаг вправо (вспомним, что команда STOP эквивалентна R.STOP) и останавливается. Тем самым к последовательности из четырех единиц прибавляется еще одна, превращая — как и требовалось — 4 в 5.
В качестве несколько более трудного упражнения можно проверить, что машина UN х 2, определяемая набором инструкций
00 ? 00R
01 ? 10R
10 ? 101L
11 ? 11R
100 ? 110R
101 ? 1000R
110 ? 01.STOP
111 ? 111R
1000 ? 1011L
1001 ? 1001R
1010 ? 101L
1011 ? 1011L
удваивает унарное число, как и должно быть, судя по ее названию.
Чтобы понять, как работает машина EUC, нужно явным образом задать пару подходящих чисел, скажем, 6 и 8. Как и ранее, изначально машина находится во внутреннем состоянии 0 и расположена слева, а лента выглядит следующим образом:
… 0000011111101111111100000….
После того, как машина Тьюринга после большого числа шагов останавливается, мы получаем ленту с записью вида
…000011000000000000…,
при этом машина располагается справа от ненулевых цифр. Таким образом, найденный наибольший общий делитель равен 2 (как и должно быть).
Исчерпывающее объяснение, почему машина EUC (или UN х 2) на самом деле осуществляет действие, для которого она предназначена, включает в себя некоторые тонкости, и разобраться в нем, может быть, даже труднее, чем понять устройство самой машины — довольно обычная ситуация с компьютерными программами! (Чтобы полностью понять, почему алгоритмические процедуры делают то, что от них ожидается, необходима определенная интуиция. А не являются ли интуитивные прозрения сами алгоритмическими? Это один из вопросов, которые будут для нас важны в дальнейшем.) Яне буду пытаться дать здесь такое объяснение для приведенных примеров EUC или UN х 2. Читатель, шаг за шагом проверив их действие, обнаружит, что я незначительно изменил обычный алгоритм Евклида, чтобы получить более компактную запись в рамках используемой схемы. И все же описание EUC остается достаточно сложным, включая в себя 22 элементарные инструкции для 11 различных внутренних состояний. В основном эти сложности носят чисто организационный характер. Можно отметить, например, что из этих 22 инструкций только 3 в действительности изменяют запись на ленте! (Даже для UN х 2 я использовал 12 инструкций, половина из которых меняют запись на ленте.)
Данный текст является ознакомительным фрагментом.